Automatic deformation mechanical figure toy
A robot and toy technology, applied in the field of automatic deformation robot toys, can solve the problems of automatic deformation, no space to install driving moving parts, complex deformation mechanism, etc., and achieve the effect of simple deformation process, simple structure and space saving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0024] Realization of various functions:
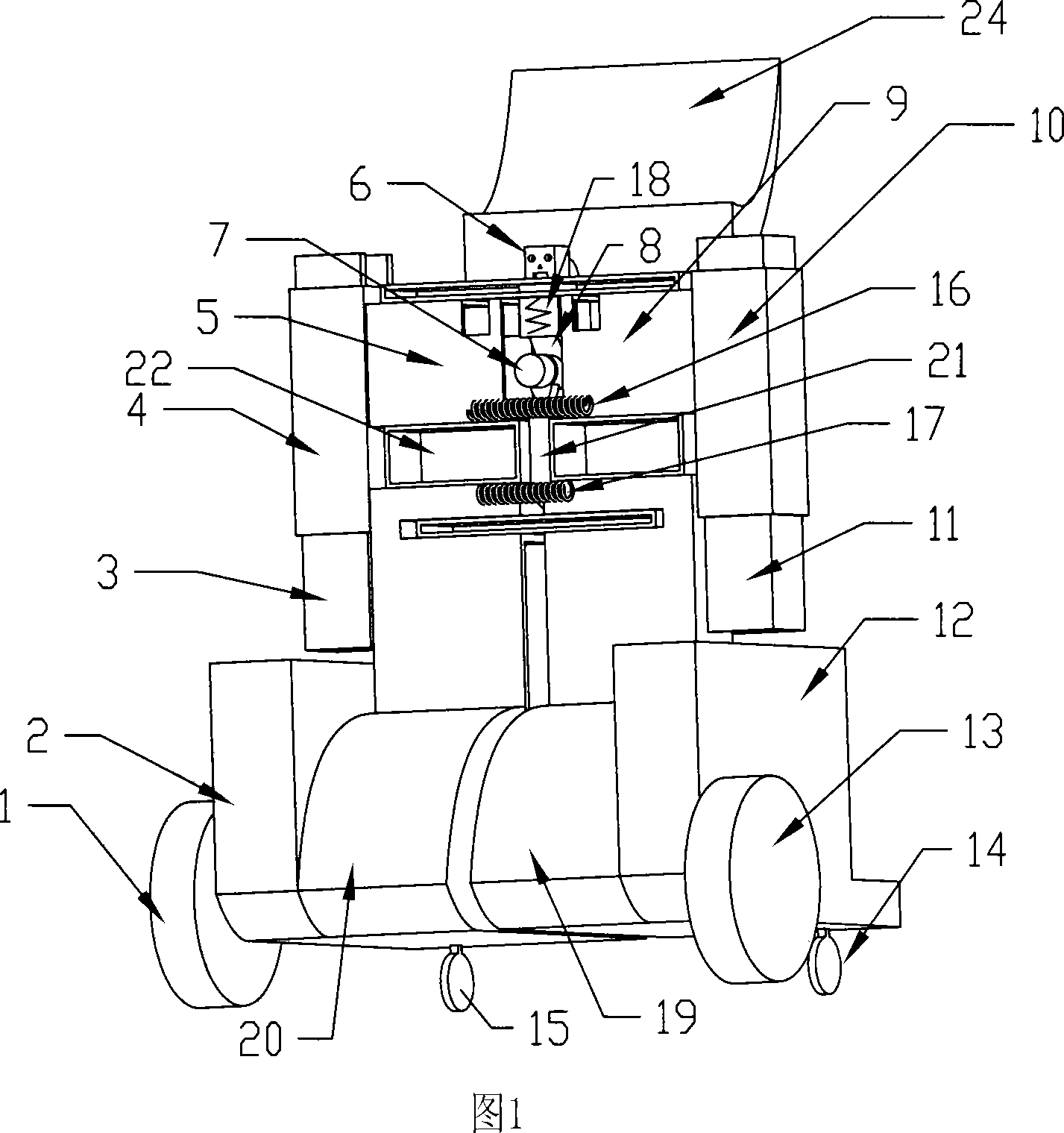
[0025] a. Extension and retraction of the head. The square hole on chest cavity 22 top shown in Figure 1 is the telescopic sliding hole of head 6, and head 6 can double as push rod, and whole head is elongated cuboid shape, can slide in the square hole on chest cavity 22 tops. One end of spring 18 links to each other with head 6, and the other end links to each other with chest cavity 22, and head 6 retracts chest cavity 22 under the effect of spring 18 like this when composite cam 8 rotates from high point to low point.
[0026] b. Extension and retraction of hands. The square cavity formed by the top of the chest cavity 22 shown in Figure 1 and the chest cavity loam cake provides a sliding cavity for the slide arm 9 in the left chest cavity and the slide arm 5 in the right chest cavity. The sliding arm 5 in the right thoracic cavity is connected. When the composite cam 8 rotates through the corresponding angle, the sliding arm 9 i...
Embodiment 2
[0042] This embodiment is only different from Embodiment 1 in four places. The first place is, in the present embodiment, a screw nut is used at the upper arm, that is, the motor 29 is fixed on the left upper arm 10, the left lower arm 11 is fixedly connected with the nut 30, and the lead screw 31 is connected with the rotor of the motor 29 to realize the left lower arm 11. Slide along the lumen of left upper arm 10 . The second is that the locking mechanism at the foot adopts a spring-returning electromagnet, and the functions in Embodiment 1 are realized by energizing and disconnecting the electromagnet. The third place is to open a small slit at an appropriate position on the left leg 28 and when the electromagnet 32 is de-energized, the stopper 34 is inserted into the small slit on the left leg 28 under the action of the spring 33, so that the robot body is convenient for the feet to be relatively fixed. , thus locking the robot. The fourth point is that in this embodi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More