

Five-freedom degree dermaskeleton type upper limb rehabilitation robot interactive rehabilitation training control policy
A rehabilitation robot and rehabilitation training technology, applied in the field of rehabilitation robots, can solve problems such as ignoring motion intentions, small range of motion, single types, etc., and achieve the effects of promoting rehabilitation treatment, reducing weight, and exciting diseased brains
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described below in conjunction with accompanying drawing and specific embodiment:
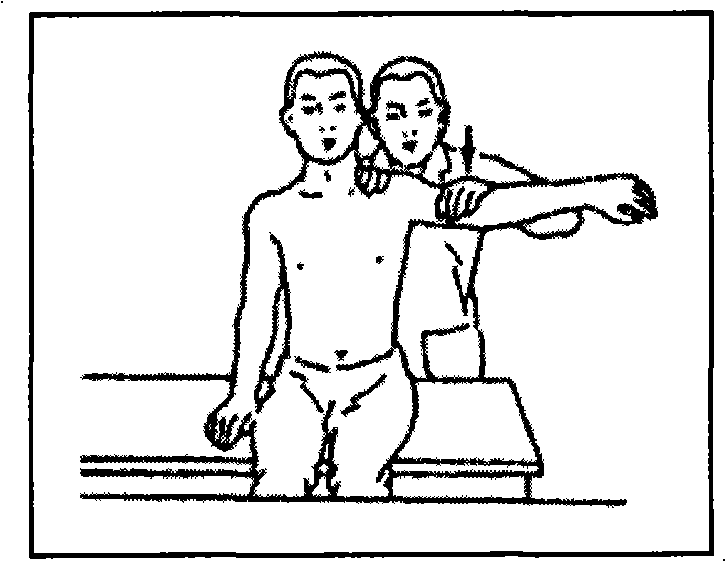
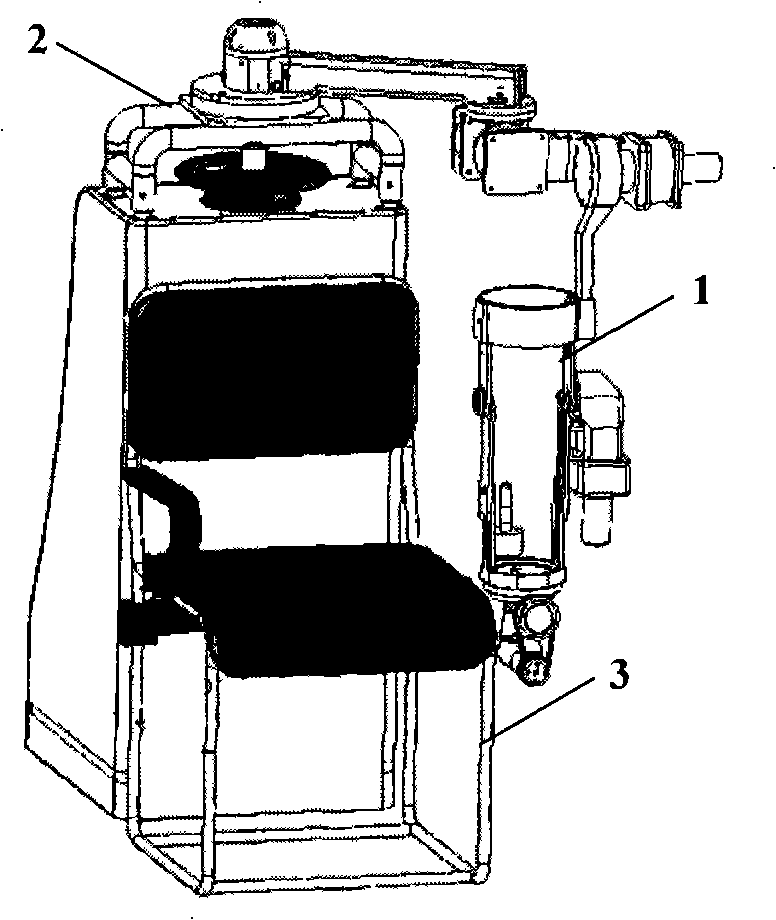
[0019] to combine figure 2 , the system rehabilitation training device of this embodiment consists of a rehabilitation mechanical arm body 1, a drive motor, an adjustable lifting mounting frame 2, a seat 3 and a control cabinet (combined with image 3 )constitute. to combine Figure 4 The main body of the rehabilitation robot arm is designed as a duralumin exoskeleton bilateral structure, with shoulder abduction / adduction I, shoulder flexion / extension II, elbow flexion / extension III, wrist flexion / extension IV and wrist rotation For the 5 degrees of freedom of internal / external rotation V, 5 drive motors are respectively installed on the axis of each rotational degree of freedom to drive the activities of each degree of freedom. From the perspective of clinical rehabilitation, the rehabilitation training device provides patients with single-joint...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More