

Electric artificial hand combined controlled by brain electricity and muscle electricity and control method
A technology of joint control and EEG, applied in the field of information and control, can solve the problems of handicapped injury, low signal-to-noise ratio of surface EMG signal aliasing, difficulty in recognizing multi-modal movements, etc. Improved bionic performance and reliable motion control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
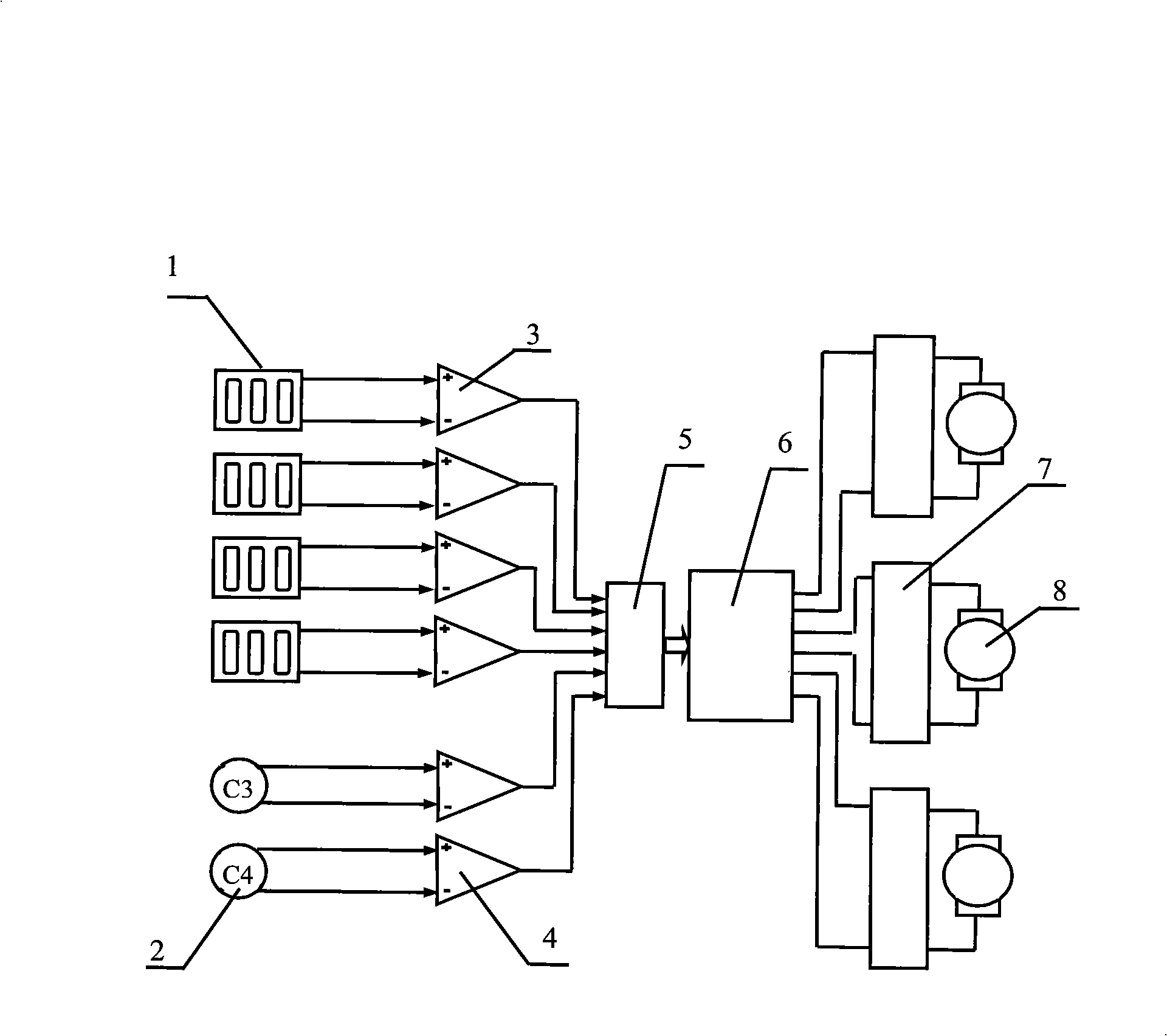
[0026] Such as figure 1 As shown, the electric prosthetic hand controlled by EEG combined with electromyography includes four electromyographic pickup sensors placed on the skin surface corresponding to the extensor carpi ulnaris, flexor carpi ulnaris, finger extensors, and pronator quadratus of the residual arm 1 and two EEG pick-up sensors 2 placed in the center of the top of the human head at the positions C3 and C4 determined according to the 10-20 lead system. Each myoelectric pickup sensor 1 includes three myoelectric pickup electrodes placed on the residual arm of the human body and the localized myoelectric primary amplifying circuit connected with the myoelectric pickup electrode signal; the output terminal of the myoelectric primary amplifying circuit Respectively connected to the corresponding myoelectric secondary processing circuit 3, the secondary processing circuit 3 includes a 10-500 Hz band-pass filter and a 50 Hz notch wave to obtain an effective frequency my...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More