

Position control method and device based on H type structure two-sided driving system
A dual-side drive and controller technology, applied in photoplate-making process exposure devices, microlithography exposure equipment, etc., can solve problems such as non-feedback, phase inconsistency, restricting the performance of control methods, and achieve precise positioning and position error reduction. , to improve the dynamic performance and the effect of parameter mismatch
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
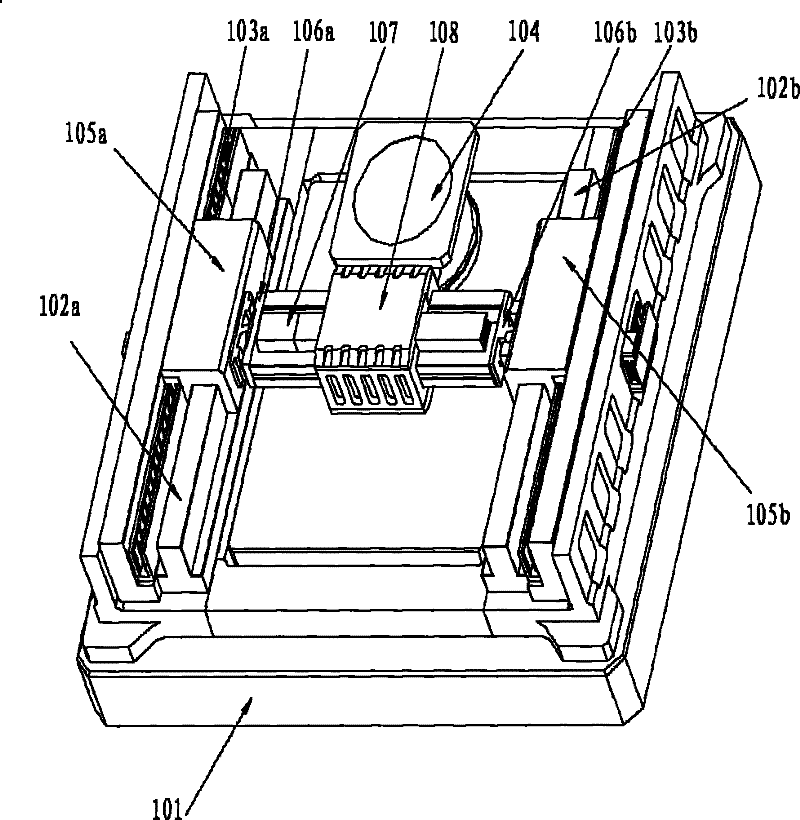
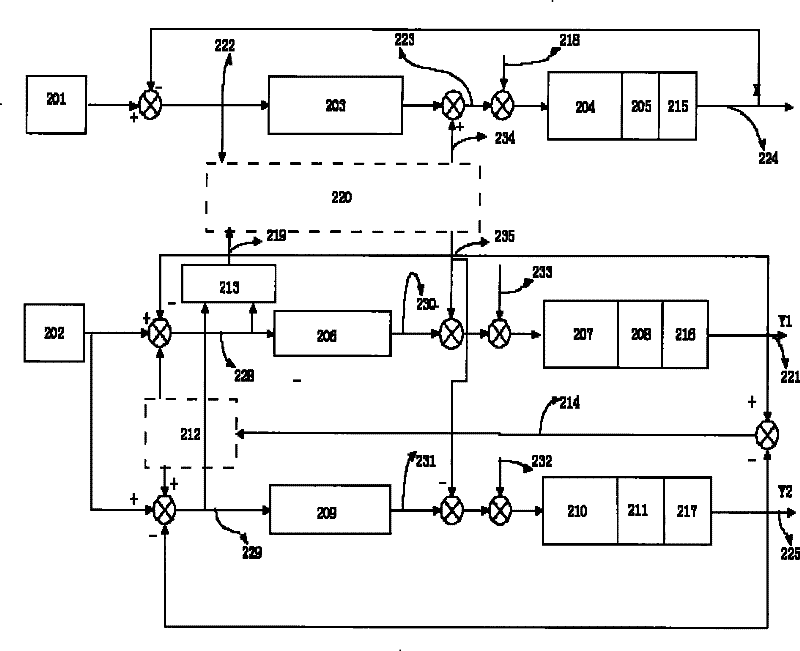
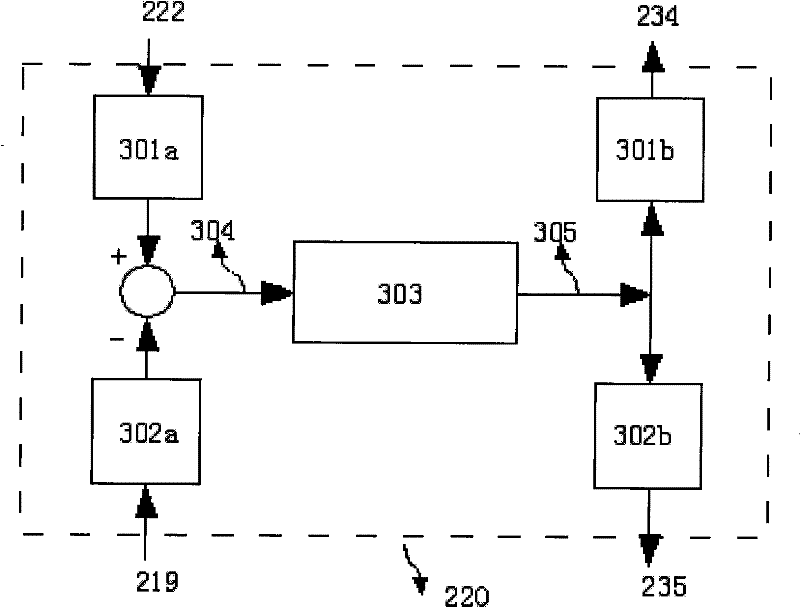
[0069] The present invention involves bilateral synchronous control of two linear motors in the Y direction. In the bilateral drive control, the outputs of the two servo systems are coupled together through the beam and the X motor, and the two motors are driven to move according to the same given signal, and there is no direct coupling relationship in electrical parameters. In an ideal state, assuming that the various performances of the two linear motors are exactly the same, and the loads acting on them are completely symmetrical, then when the same command is input, the two motors should move at the same acceleration, speed, and displacement. However, in actual situations, the performance of any two motors will not be exactly the same, and the dynamic change of the loads of the two caused by the movement of the X-direction linear motor on the beam will cause the speed of the motor to change, thus causing The position is not synchronous. In order to bring the servo system b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More