

Cooperation control system for underwater multi-robot
An underwater robot and collaborative control technology, applied in the field of robotics, can solve problems such as difficult mathematical models and difficult artificial materials, and achieve the effects of strong versatility, real-time performance, and improved work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
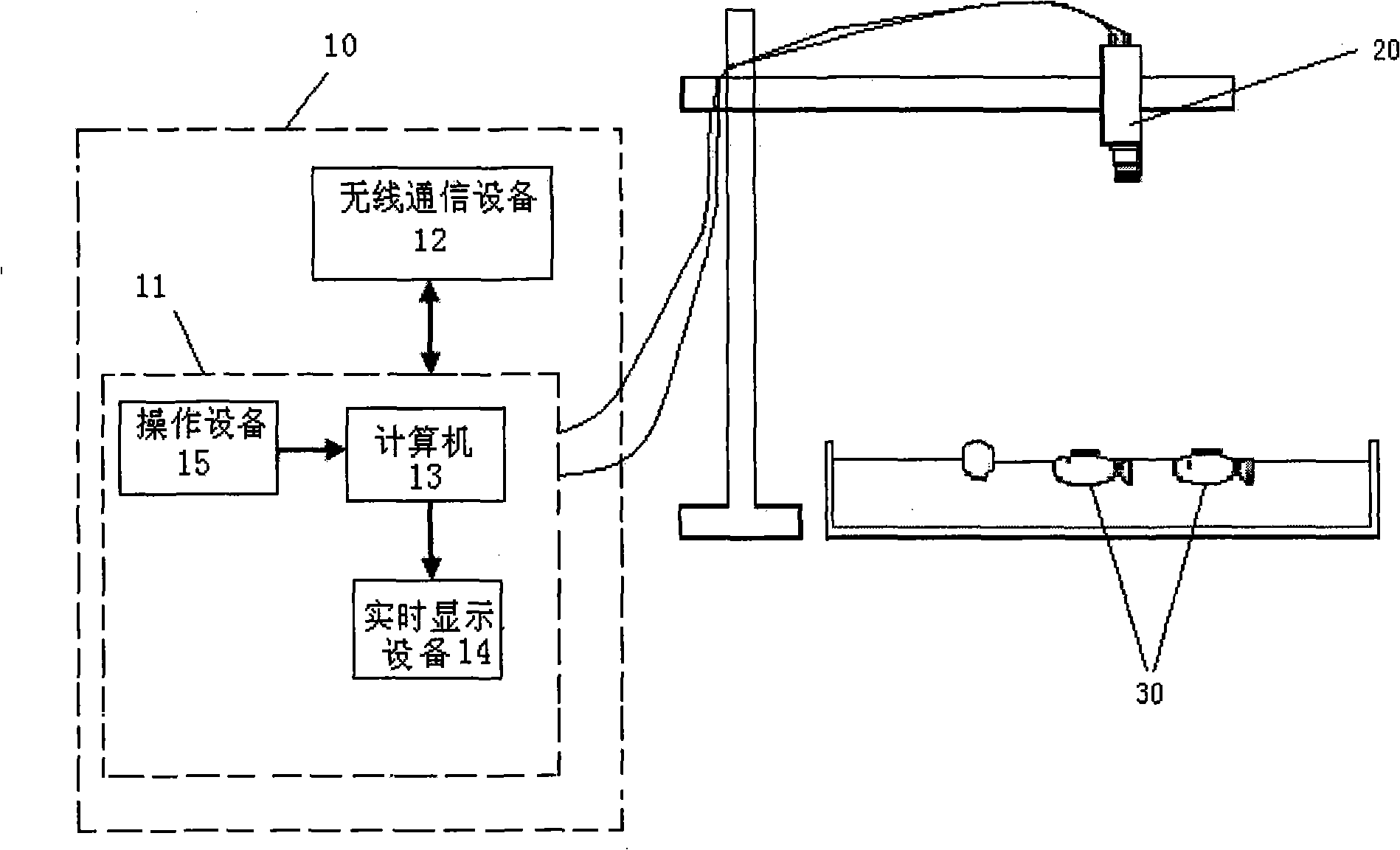
[0027] Such as figure 1As shown, the present invention includes a control system 10 , an image acquisition device 20 , a plurality of underwater robots 30 and a power supply. The user performs cooperative control on the image acquisition device 20 and the underwater robot 30 through the control system 10 .
[0028] The control system 10 includes a main control device 11 and a wireless communication device 12 . Wherein, the main control device 11 includes a computer 13, a real-time display device 14 and an operating device 15 connected in sequence, such as a keyboard and a mouse. The wireless communication device 12 adopts a duplex communication device to ensure the communication between the main control device 11 and each underwater robot 30 .
[0029] The operator sets parameters and selects tasks in the interface of the real-time display device 14...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More