

Real-time color auto acquisition robot control method and the robot
An automatic acquisition and control method technology, applied in the field of robot systems, can solve the problems that the offline statically collected color information is not applicable to the real-time environment and affects the color recognition of the robot, so as to improve the accuracy, increase the accuracy rate, improve the accuracy rate and quickly degree of effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with the accompanying drawings.
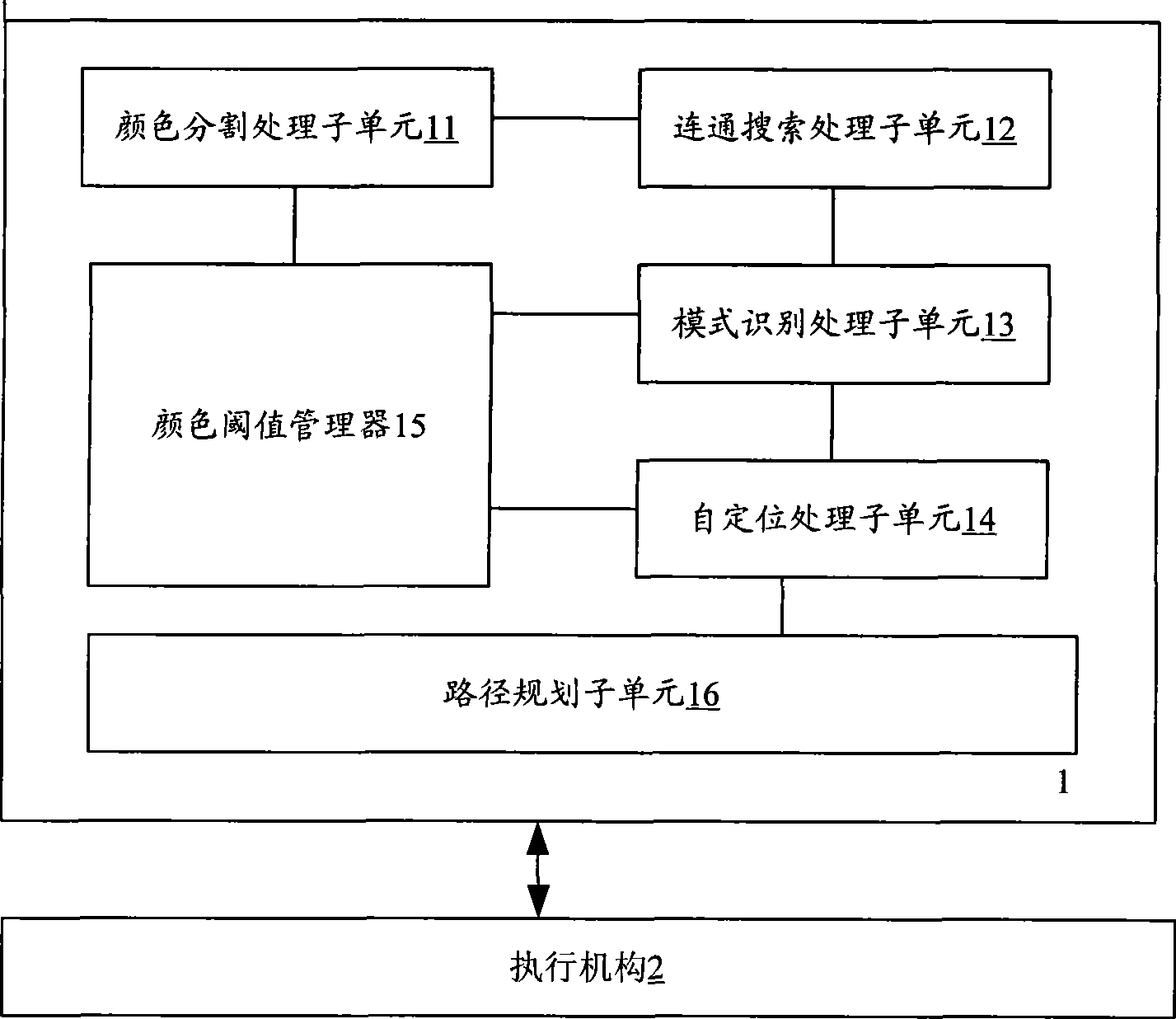
[0041] The core of the present invention is that the color acquisition system of the robot replaces the offline static sampling method of the prior art with automatic color sampling with obstacle avoidance function, and this advantage is realized by each algorithm module of the internal processor of the robot; in addition, Avoid obstacles by itself through the path planning system in the processor, realizing unmanned monitoring and avoiding obstacles by itself.
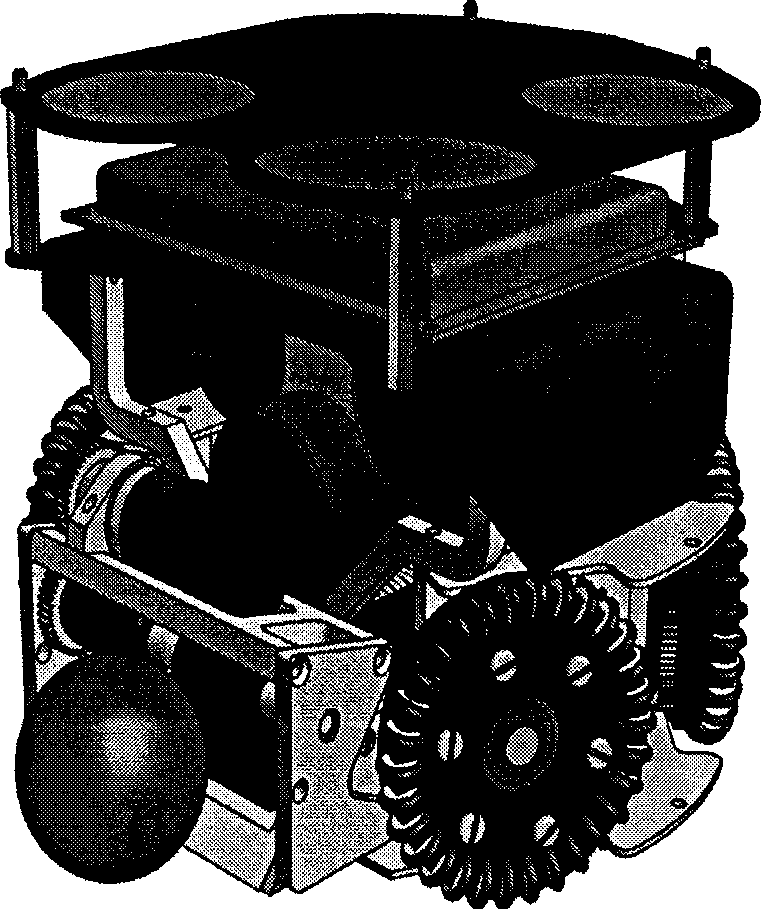
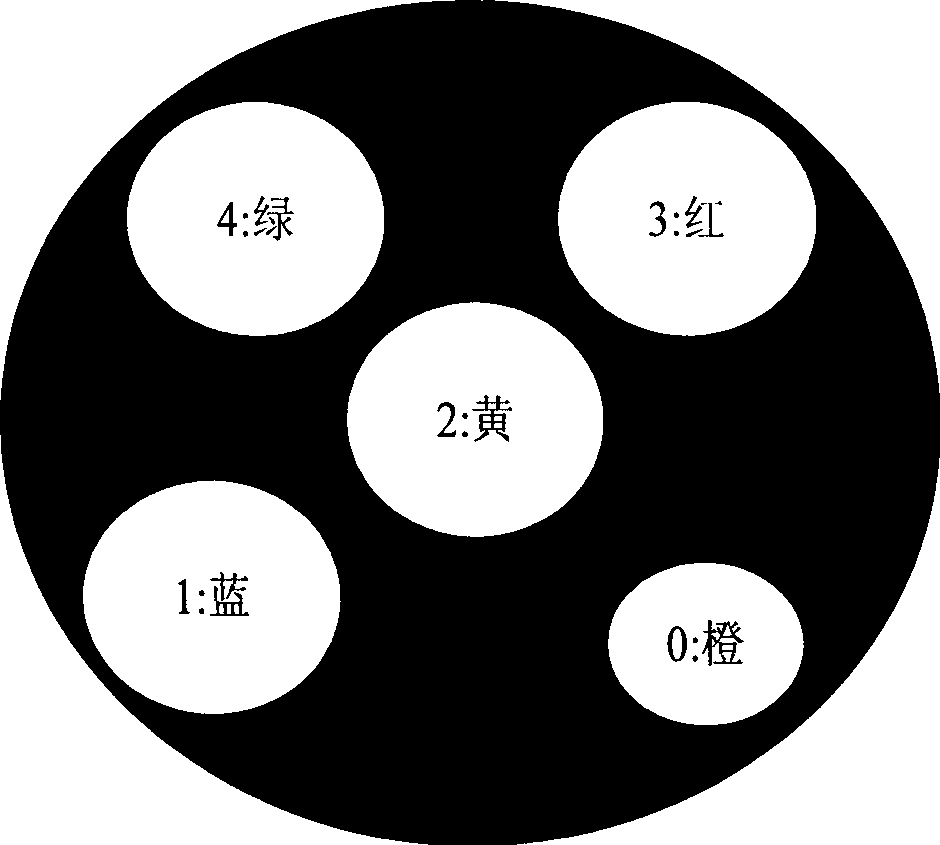
[0042] A real-time color automatic acquisition robot, please refer to figure 1 , which is a model of the robot, the robot of the present invention can adopt the f180 small football robot, the main inventive point of the present invention is to set a top cover on it, please refer to figure 2, which is an example diagram of the top cover. Top cover such as figure 2 As shown, the top cover consists of five...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More