

Inverse kinematics resolution method of permanent magnetism spherical electric motor on the basis of neural network
A neural network and inverse kinematics technology, applied in the field of inverse kinematics solution using neural network, can solve problems such as difficult solution and complex calculation, and achieve the effect of guaranteed network structure, high convergence accuracy and easy access
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0032] The permanent magnet spherical motor has the characteristics of simple structure, small size, light weight, low loss, high force index, and easy control. It can be applied to precision devices such as robot joints for multi-dimensional motion in space. Its mechanical structure diagram and the schematic diagram of the three-degree-of-freedom movement of the rotor are as follows: figure 1 , figure 2 shown.
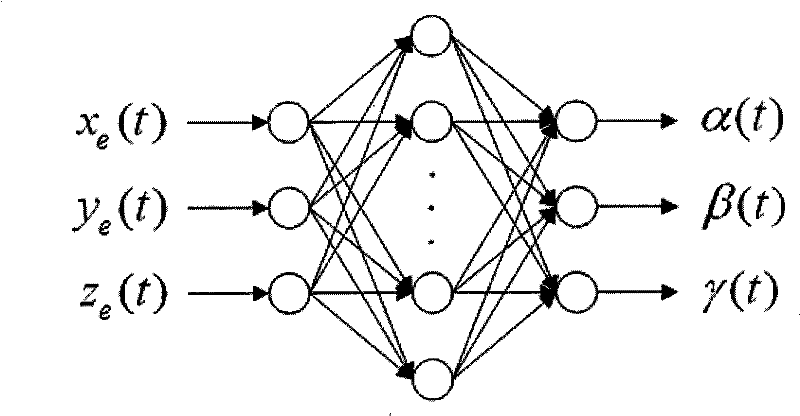
[0033] The orientation and motion of the permanent magnet spherical motor rotor can be defined by Euler angles. The kinematics of permanent magnet spherical motor is divided into forward kinematics and inverse kinematics. Among them, the former is to solve the motion of a certain point on the rotor according to the change of the Euler angle in each degree of freedom, which is the problem of solving the mapping from the Euler angle space to the Cartesian space; the latter is the opposite process, which is from The problem of solving the mapping from Cartesian space...
Embodiment 2
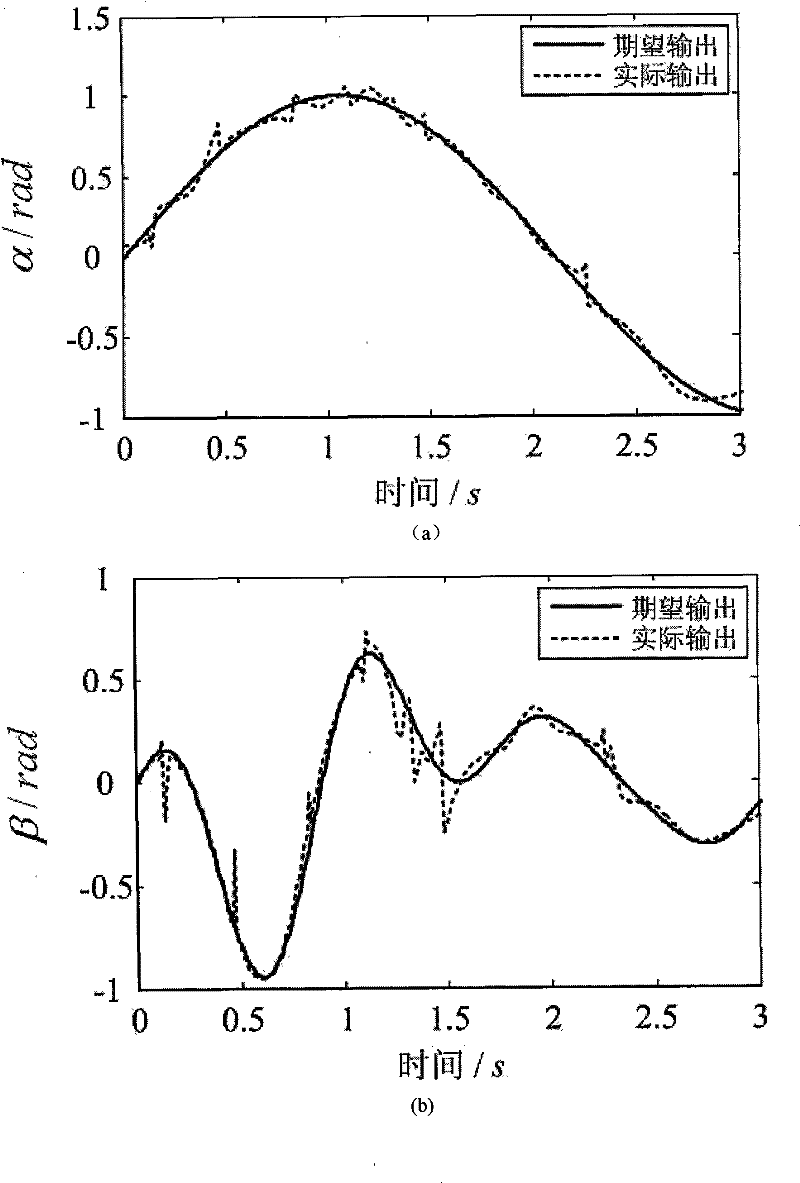
[0100] In the following, we investigate the solution of the inverse kinematics of the permanent magnet spherical motor by the neural network under the condition that the initial value of the Euler angle is not zero. Nutating motion is one of the working conditions that can best examine the torque controllability of spherical motors. Given the change trajectory of Euler angle when the permanent magnet spherical motor is doing nutating motion, the spatial trajectory of nutating motion can be obtained according to the forward kinematics. Then use the trained neural network to solve the change of Euler angle according to the space trajectory. Comparing the given Euler angle change trajectory with the Euler angle change obtained by the neural network solution, the comparison results are as follows Figure 5 As shown, among them, Figure 5 (a), (b), and (c) respectively correspond to the comparison of the three Euler angles α, β, and γ.
[0101] Depend on Figure 5 It can be see...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More