

Scene matching semi-physical simulation system based on mechanical arm with six degree of freedom
A technology of semi-physical simulation and robotic arm, which is applied in the field of scene matching semi-physical simulation system and geophysical field navigation system, can solve the problems of long research and development and experiment cycle, and achieve the effect of strong versatility and scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
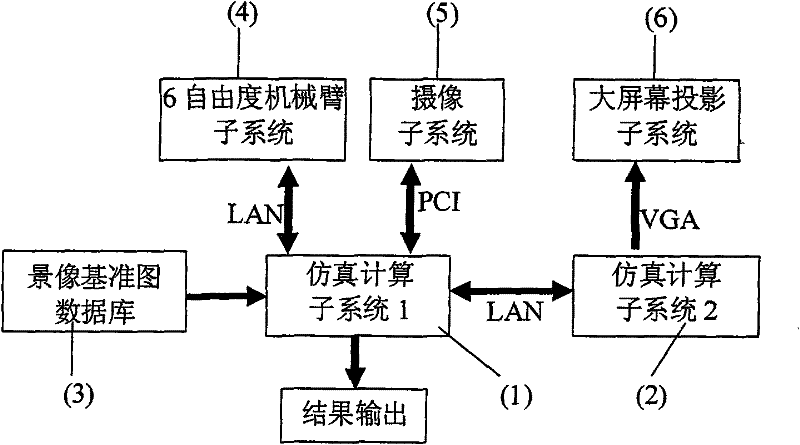
[0024] like figure 1 and Figure 5 As shown, the present invention consists of a simulation calculation subsystem 1 (1), a simulation calculation subsystem 2 (2), a scene reference map database (3), a 6-DOF robotic arm subsystem (4), and a camera subsystem (5). It is composed of a large-screen projection subsystem (6), and the simulation computing subsystem 1 (1) transfers the scene reference map in the scene reference map database (3), and uses the matching area selection and track planning software to generate matching area data. and track data, including the position of the track, the size of the matching area, the position of the matching area and the resolution data of the reference map, send these data and the flight speed of the aircraft (set through the man-machine interface) to the simulation computing subsystem through the network 2(2), the simulation computing subsystem 2(2) controls the scrolling speed of the scene reference graph and projects it on the large scre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More