

Unmanned aerial vehicle vision/inertia integrated navigation method in unknown environment
A technology of unknown environment and navigation method, which is applied in the field of UAV vision/inertial integrated navigation, achieving the effects of wide adaptability, good concealment, and high navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Before carrying out this method, it is necessary to first define and align the coordinate system:
[0035] 1. Definition of coordinate system
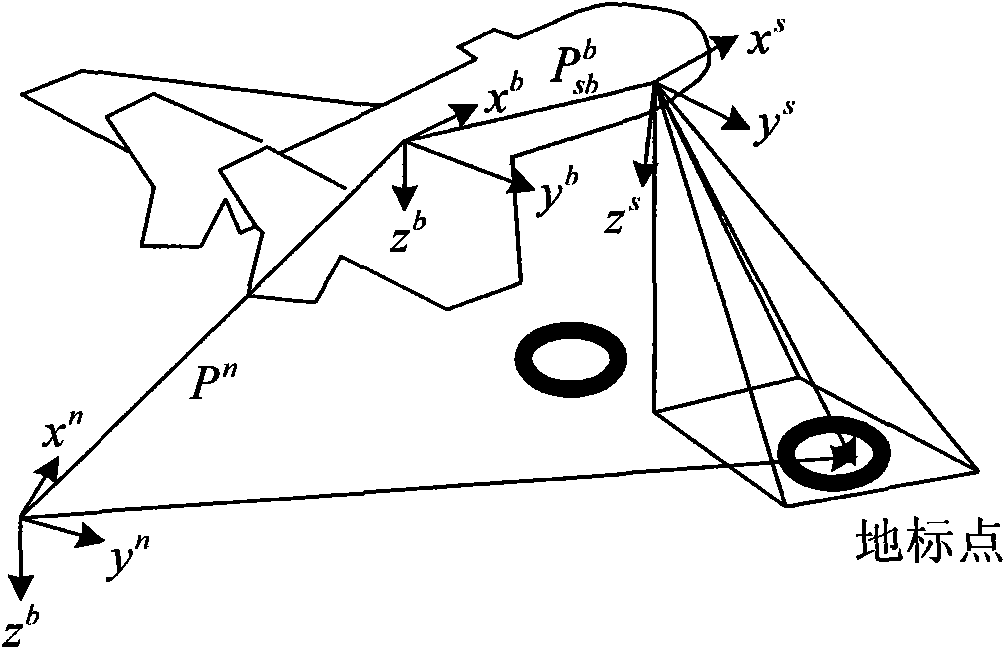
[0036] like figure 1 As shown, the coordinate axis definition includes the body coordinate system (o b x b the y b z b ), navigation coordinate system (o n x n the y n z n ), camera coordinate system (o s x s the y s z s ) and the IMU coordinate system (o i x i the y i z i )Definition;
[0037] Camera coordinate system (o s x s the y s z s): Fasten the visual sensor on the aircraft to obtain a series of ground images, and its coordinate origin is located at the center of the camera, o s z s along the optical axis of the camera, o s x s and o s the y s Along the length and width directions of the imaging plane of the camera respectively, the three are perpendicular to each other to form a right-handed coordinate system;
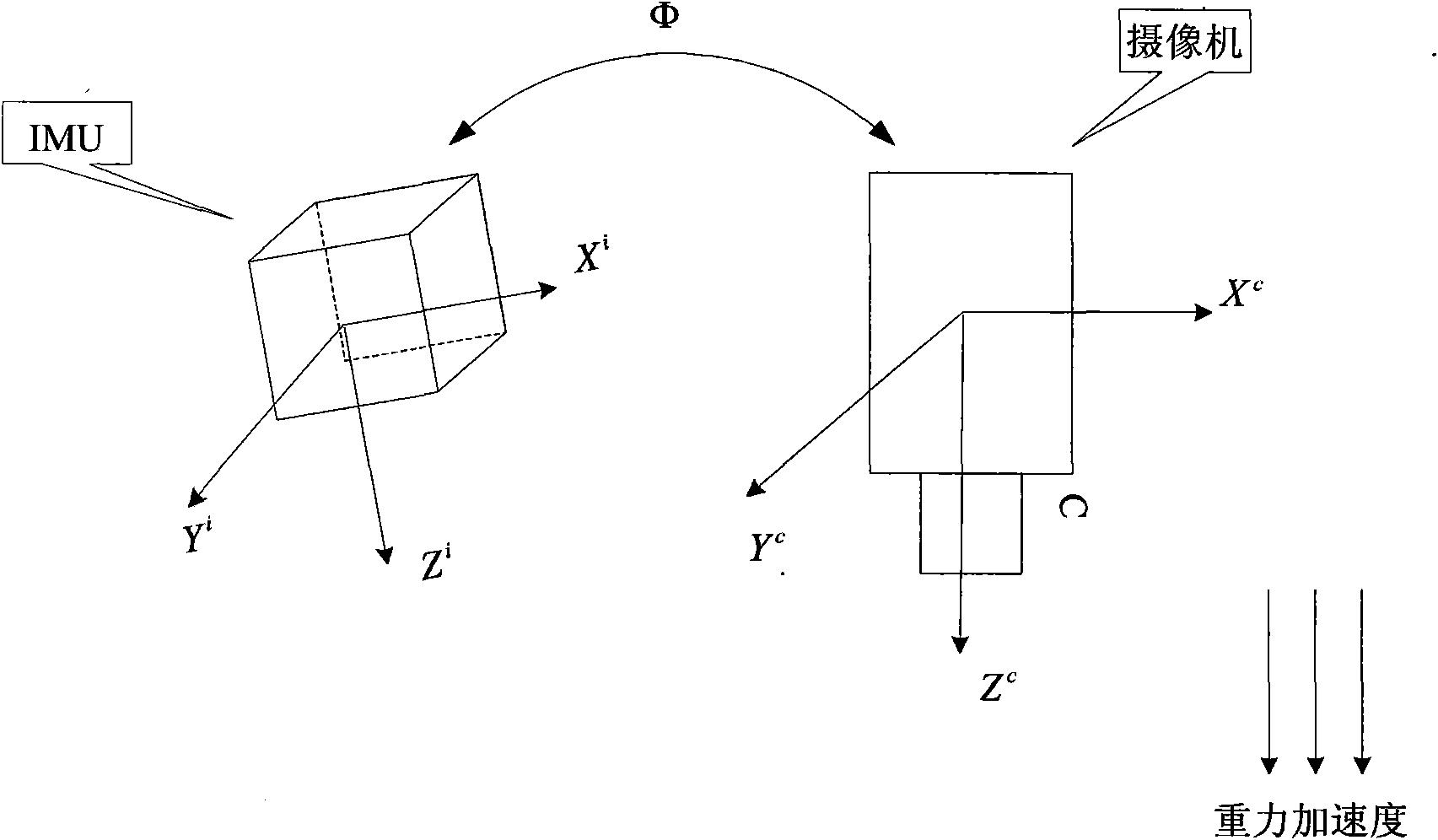
[0038] IMU coordinate system (o i x i the y i z i ): The coordinate system def...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More