

Auxiliary rehabilitation exercise device for realizing finger rehabilitation exercise
A technique for rehabilitation training and fingers, which is applied in passive exercise equipment, physical therapy, etc., can solve the problems of discontinuous braking torque, low enthusiasm, energy dissipation, etc., and achieve low requirements for machining accuracy and small moment of inertia , control simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
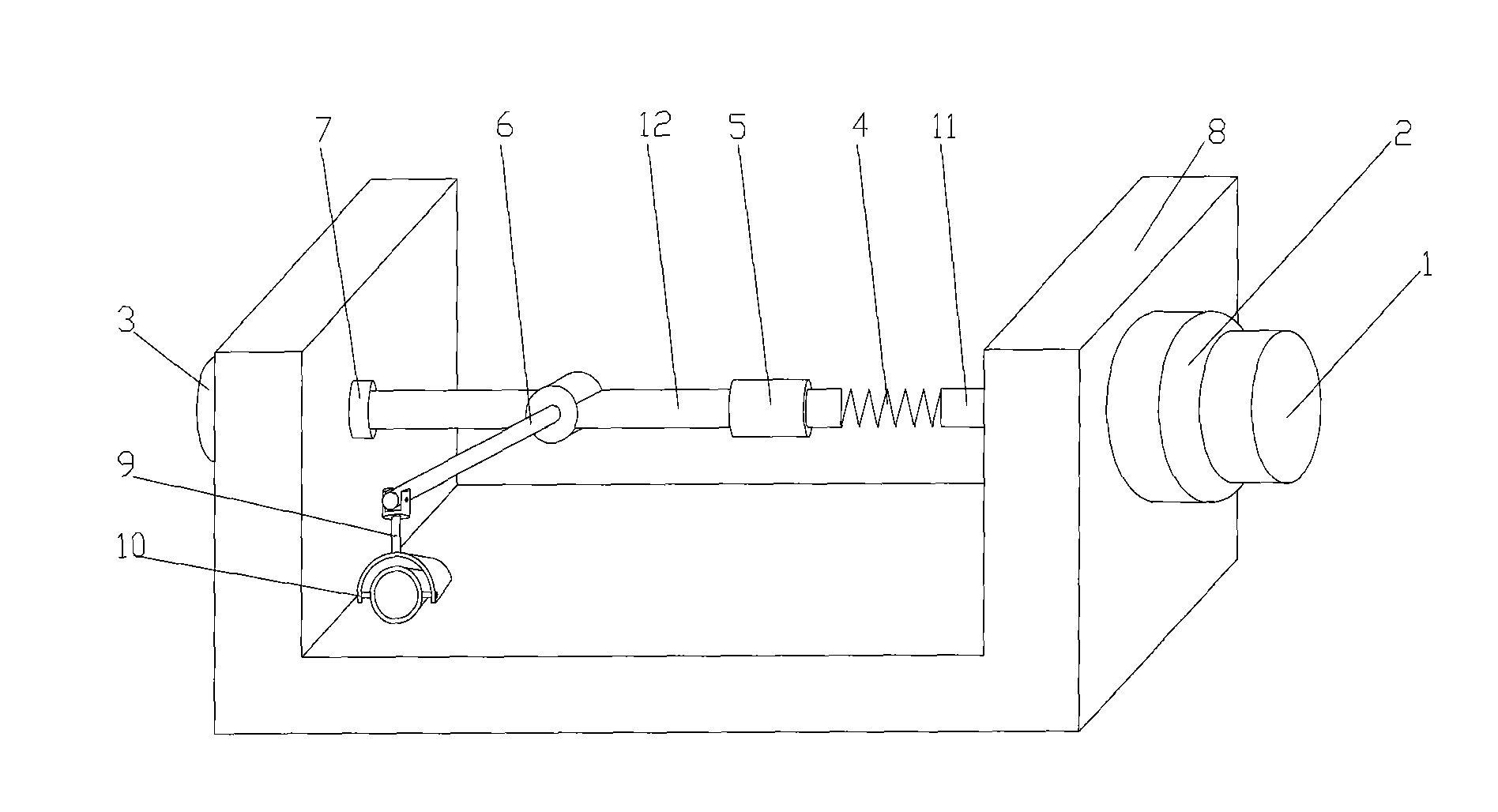
[0024] An auxiliary rehabilitation training device for finger rehabilitation training, comprising a concave bracket 8, two shafts 11 and 12, a motor 1, a coupling 2, a magneto-rheological fluid damper 3, and a spring 4. An angle sensor 7, a force sensor 5, a handle 6, a finger support 10, and a connecting fastener 9 between the handle 6 and the finger support 10. First shaft 11 is installed on the right end of support 8 by bearing, links to each other with motor 1 by coupling 2, links to each other with second shaft 12 by spring 4, and second shaft 12 is installed on the left end of support 8 by bearing, the second The shaft 12 is fixedly connected with the shaft of the magneto-rheological fluid damper 8, the housing of the magneto-rheological fluid damper 8 is fixed on the bracket 8, the force sensor 5 and the angle sensor 7 are installed on the second shaft 12, and the handle 6 is installed on the second shaft 12, can drive the rotation of the second shaft 12, and the other ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More