

Method and device for controlling robots for welding workpieces
A robot and workpiece technology, applied in the direction of using optical devices, general control systems, program control, etc., can solve the problems of unable to identify the height of the profile, unable to identify the starting and ending cutting edges of the profile incision, etc., to achieve great flexibility. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
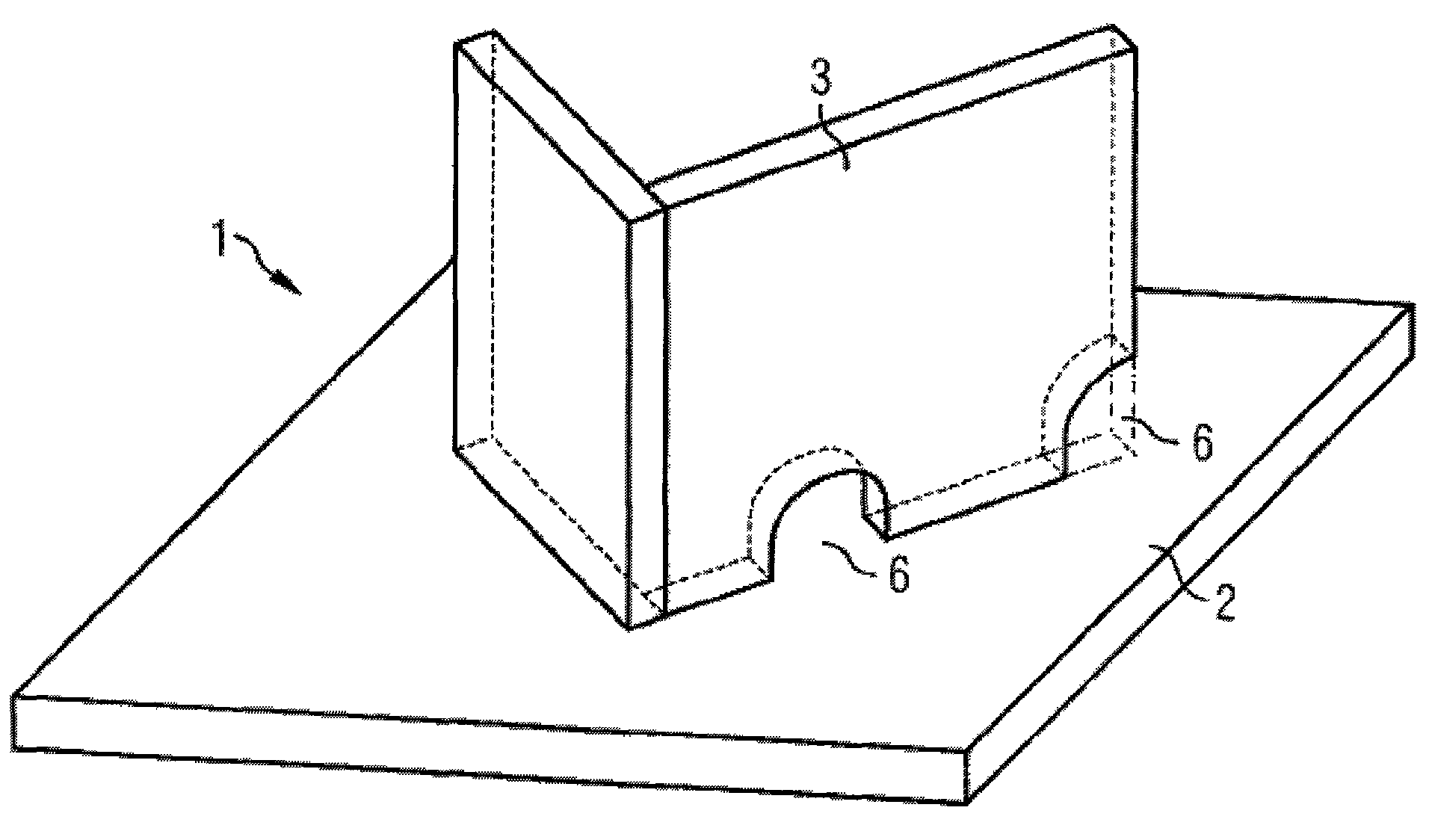
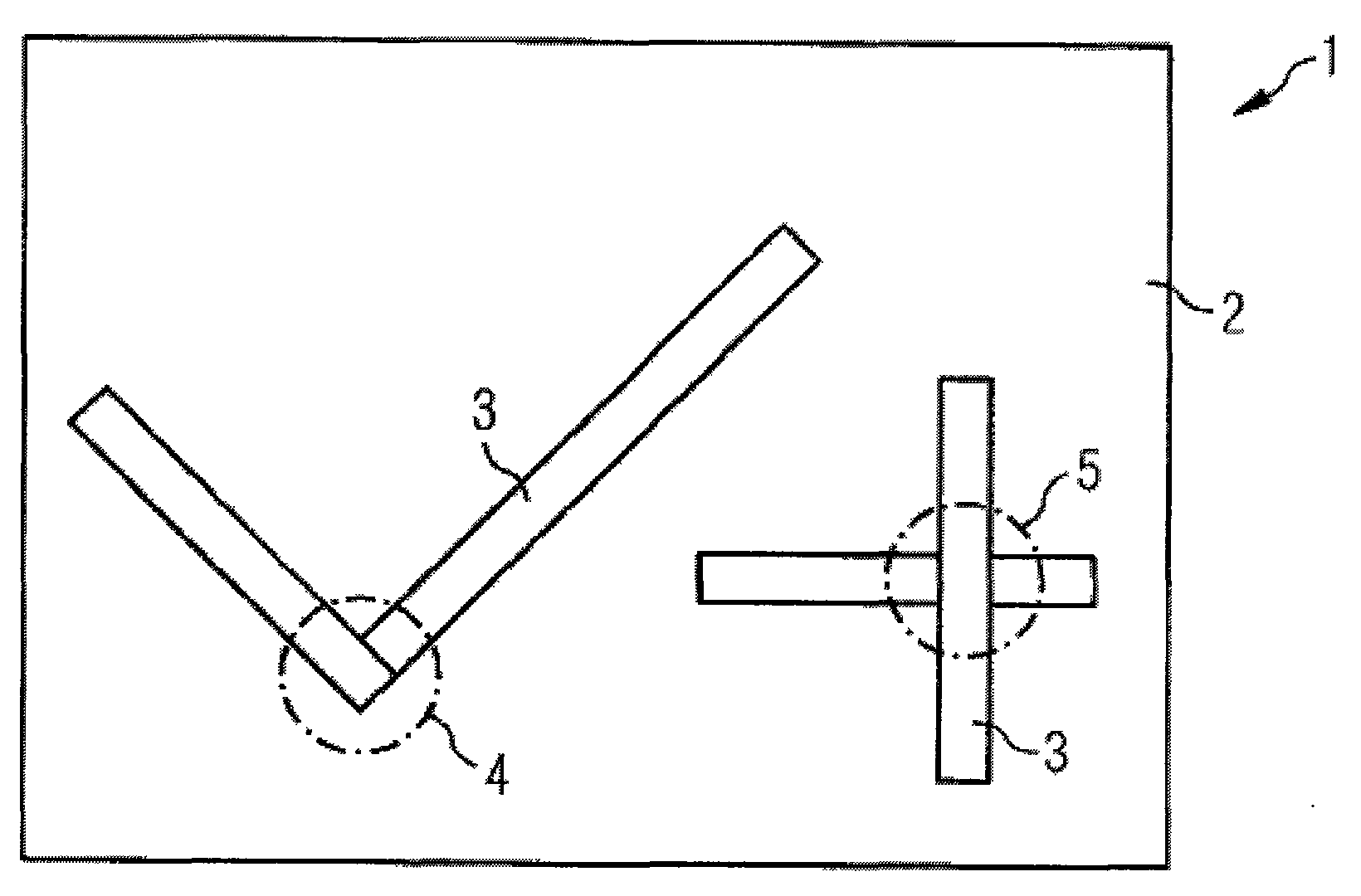
[0016] exist figure 1 and figure 2 Two micropanels 1 are shown in a simplified manner in , generally comprising steel plates 2 commonly used in shipbuilding, and having steel profiles 3 spot welded to the steel plates 2, the surface area of which generally does not exceed 3m x 16m. The micropanels shown are constructed in a schematic manner only, generally the steel plate 2 is provided with burn-throughs 6 and undercuts, and the number of profiles 3 is also greater.
[0017] These micropanels 1 , ie profiles 3 and steel plates 2 , are welded by a robot, such as an articulating arm robot, with the aim of controlling said welding in an automatic manner. For this, a welding line in the x-y plane must be defined between the profile 3 and the steel plate 2 and a welding line in the z direction must be defined between the profiles 3 .
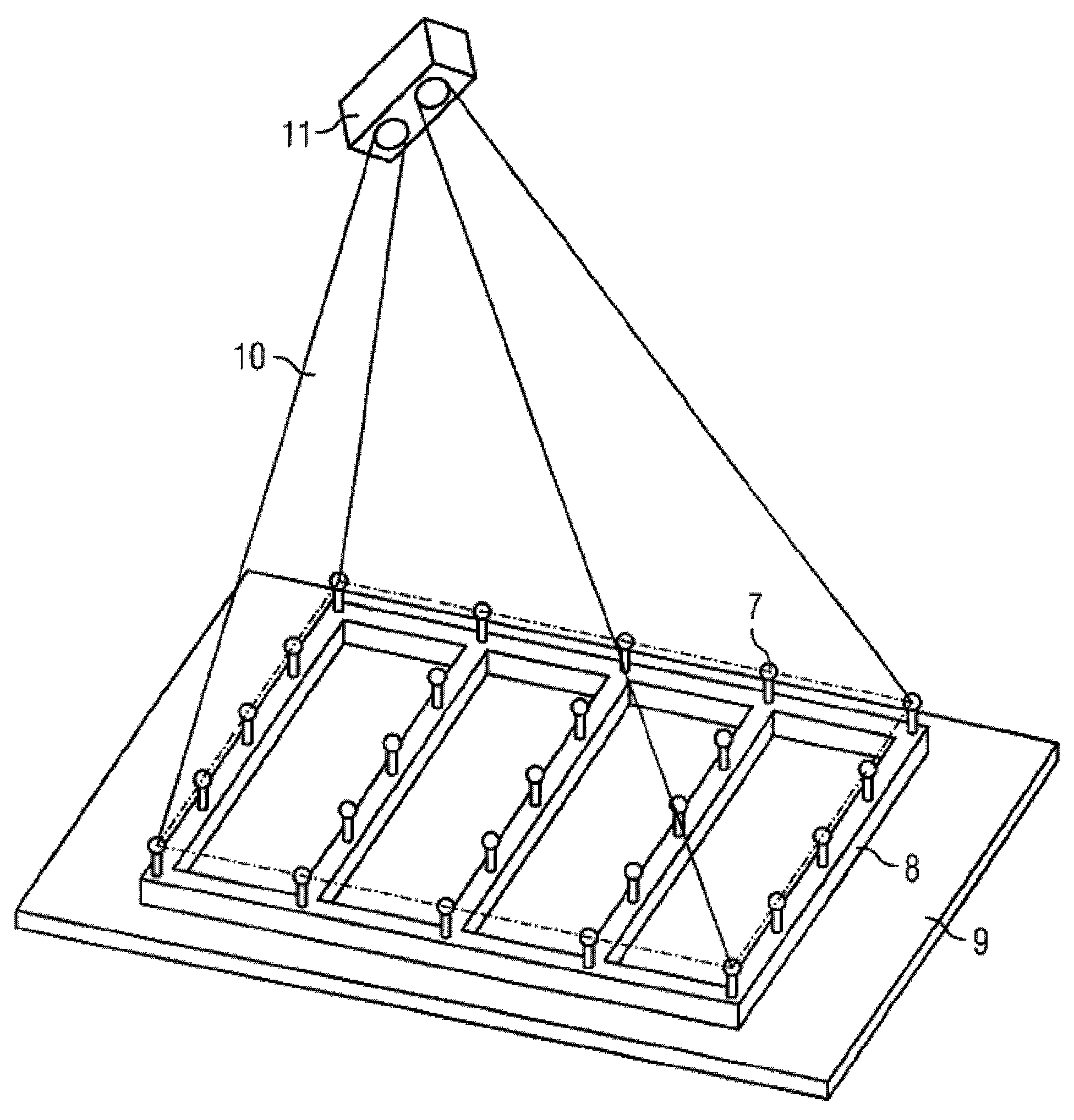
[0018] Therefore, in this embodiment, a 3D laser scanner is used to scan the placed micro-panel 1, and according to the size of the working are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More