

Capsule robot and multi-wedge effect drive control method thereof
A capsule robot, circular technology, applied in the direction of surgical robots, applications, manipulators, etc., to achieve the effect of eliminating gaps, increasing thrust, and reducing thickness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Specific embodiments of the present invention will be described in detail below in conjunction with technical solutions and accompanying drawings.
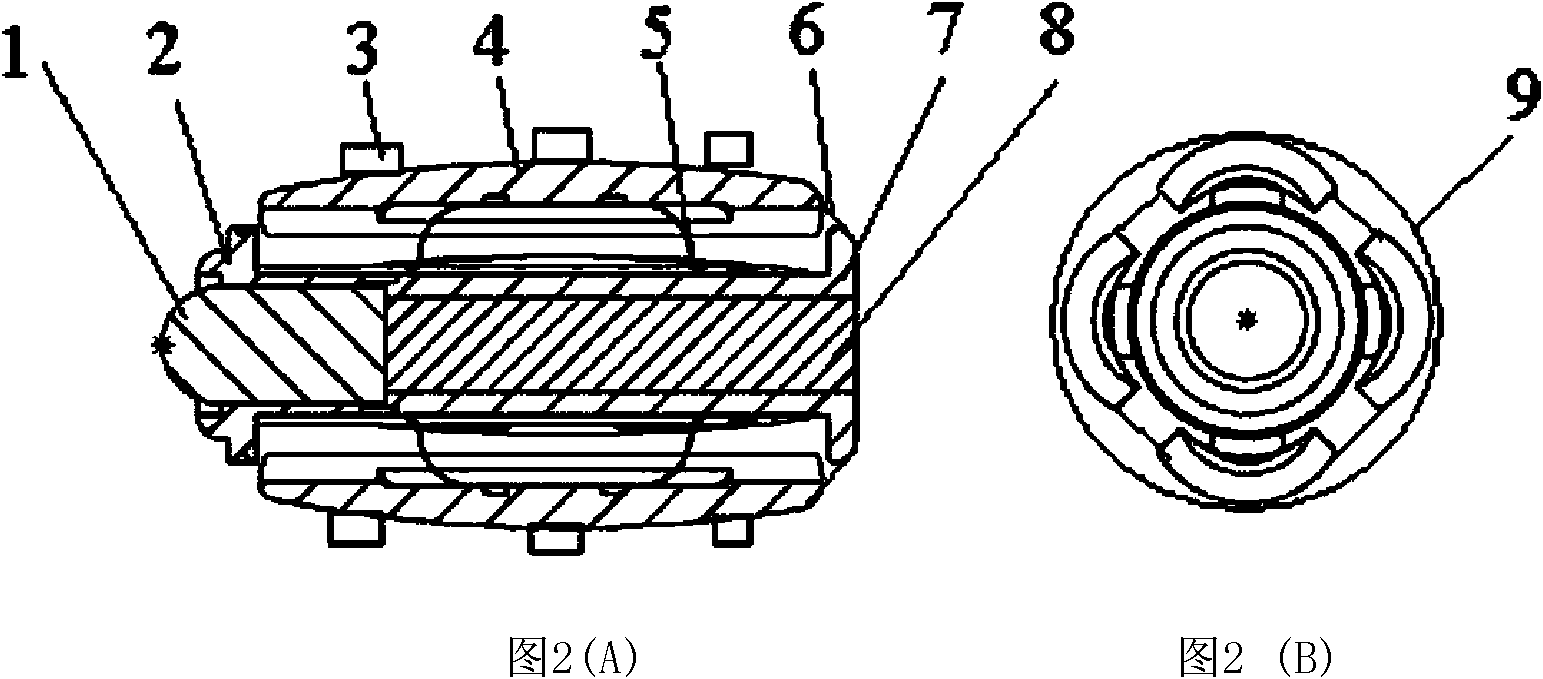
[0035] Combined with the micro-elastic hinge elements 5 evenly distributed along the circumferential direction in Figure 2, it is connected with the copper tile 4 with the spiral rib 3 at a certain initial deformation, and several copper tiles 4 are pushed away in the radial direction. When concave, the copper tile 4 on one side can be compressed to increase the flexibility of the robot surface to adapt to the complex internal environment. The initial deformation of the micro-elastic hinge element 5 also makes several copper tiles 4 smaller in diameter. Easier to stretch radially. The axial section along each copper tile 4 presents an oval shape, which is to increase the flexibility of the robot surface to adapt to the complex internal environment; along the vertical axis of the robot and the section of each copper tile 4 p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More