

Kinematics calibration method of measurement robot
A technology for measuring robots and kinematics, applied in the field of measurement, can solve the problems of difficult automation, laborious, time-consuming, etc., and achieve the effect of long installation time, low cost and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
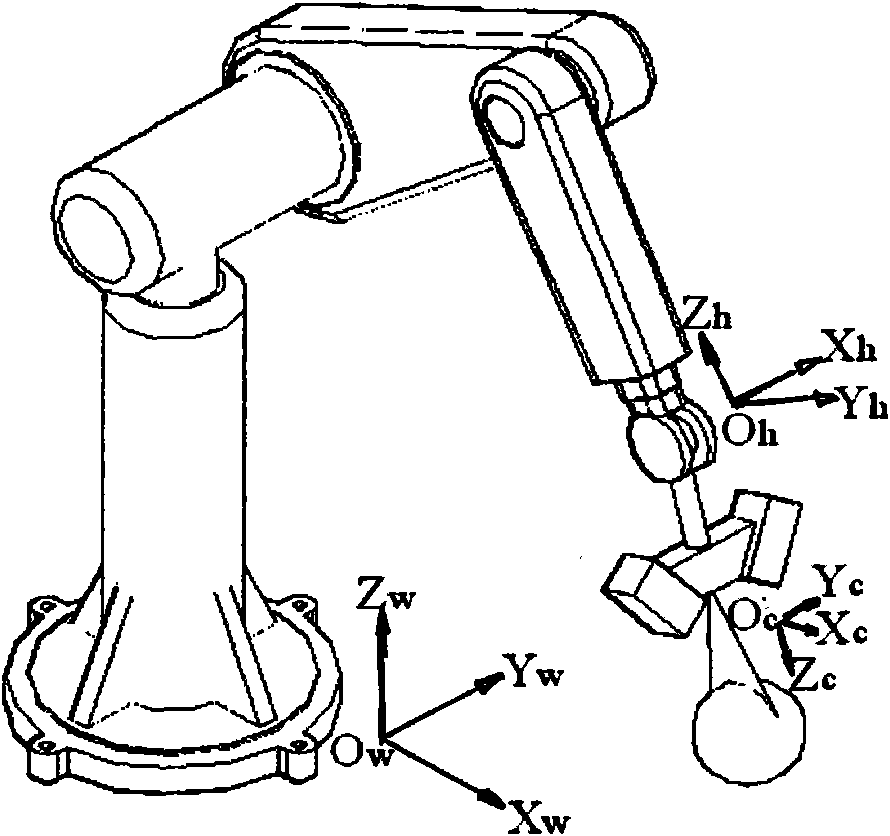
[0009] Industrial robots generally have an open-loop motion structure, and the angle value of each axis can be determined through an angle measuring device. By establishing the corresponding homogeneous equation on each axis and constructing the motion model of the robot, the end position and posture of the robot can be determined. Determining the homogeneous transformation matrix of each axis of the robot requires four parameters: connecting rod length a, connecting rod offset d, connecting rod torsion angle α, and shaft rotation angle θ. By multiplying these homogeneous matrices together, the pose of the end of the robot can be determined. In this article, the structured light sensor is installed at the end of the robot. Suppose the pose matrix of the sensor coordinate system relative to the robot end coordinate system is H, and the pose matrix of the sensor coordinate system relative to the robot base coordinate system
[0010] T=F(a, d, α, θ, H)
[0011] Since the connecting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More