

Four-bar linkage artificial limb knee joint based on magneto rheological effect
A magneto-rheological effect and four-link technology, applied in prosthetics, medical science, artificial legs, etc., can solve the problems of not being able to simulate the change of the center of the knee joint of the human leg, no structural integration, and insufficient compactness of the mechanism. , to achieve the effect of compact structure, continuous damping force and small space occupation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
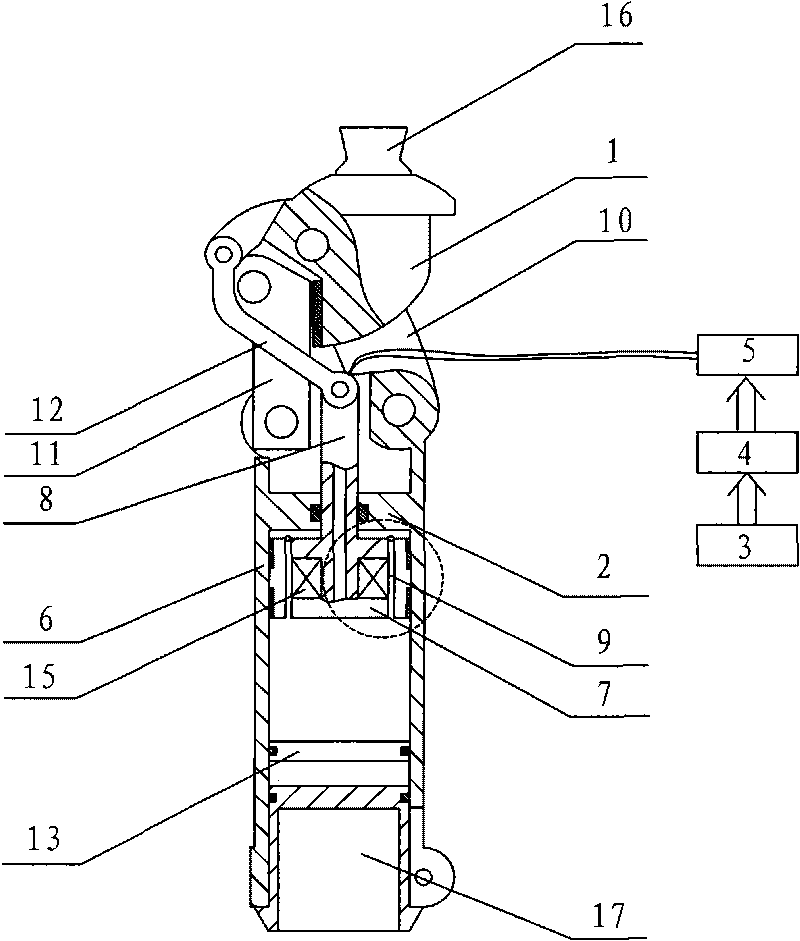
[0026] Such as figure 1 As shown, the four-link prosthetic knee joint based on the magneto-rheological effect of this embodiment includes a thigh bearing part 1, a calf support part 2, a four-bar linkage mechanism and a semi-active damping force control assembly;
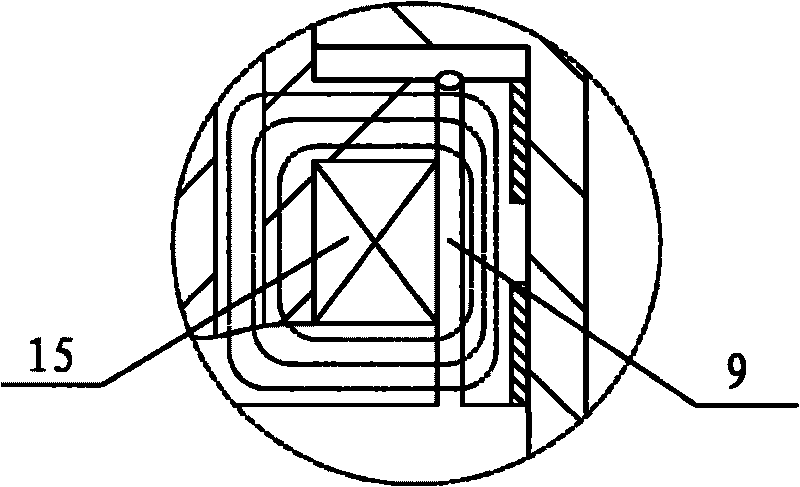
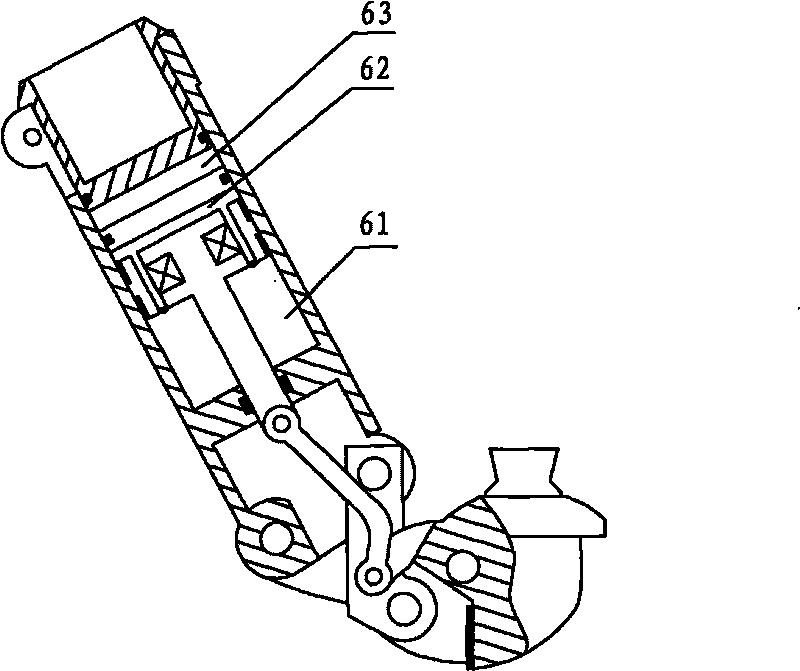
[0027] The semi-active damping force control assembly includes a sensor 3, a control unit 4, a current driver 5, and a magnetorheological damper; wherein, the magnetorheological damper includes a cylinder 6, a piston 7 and a piston rod 8, and the cylinder 6 is filled with The magnetorheological fluid is arranged on the calf support part 2 and integrated with the calf support part 2, and the piston 7 is slidingly matched with the cylinder body 6, as image 3 As shown and the cylinder body 6 is divided into an upper cylinder 61 and a lower cylinder 62, the piston 7 is provided with a throttling passage 9, and its two ends communicate with the upper cylinder 61 and the lower cylinder 62 respectively; the cross-sectiona...
specific Embodiment 2
[0033] Such as Figure 4 As shown, the difference between this embodiment and Embodiment 1 is that the outer diameter of the piston 7 is smaller than the inner diameter of the cylinder 6, and the gap between the piston 7 and the cylinder 6 forms a throttling channel 9', and the piston 7 is wound around the axis There is an exciting coil 15', such as Figure 5 As shown, in this embodiment, the piston and the cylinder are made of the same material with the same magnetic permeability, and the magnetic field lines of the electromagnetic field radially pass through the throttling passage 9', and pass through the piston and the cylinder wall to form a magnetic field. The consistency and uniformity of the throttling channel gap during movement is guaranteed by the cooperation between the piston rod and the upper end hole of the cylinder body and the cooperation between the piston and the cylinder body.
specific Embodiment 3
[0034] Such as Image 6 As shown, the difference between this embodiment and Embodiment 1 is that the throttling passage can also be arranged outside the cylinder body 6, and communicate with the upper cylinder 61 and the lower cylinder 62 respectively through conduits, along the throttling passage 9″ An excitation coil 15 ″ is wound around the axis to control the flow rate of the magnetorheological fluid in the throttling channel. The specific structure can adopt the structure of the magnetorheological valve adopted in patent ZL200420033801.X or ZL200410022657.4.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More