

Charging and blanking robot of punch press
A technology of robots and punching machines, which is applied in the direction of manipulators, program-controlled manipulators, chucks, etc., can solve problems such as large size, achieve high transmission efficiency, improve dynamic control performance, and reduce inertial loads.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
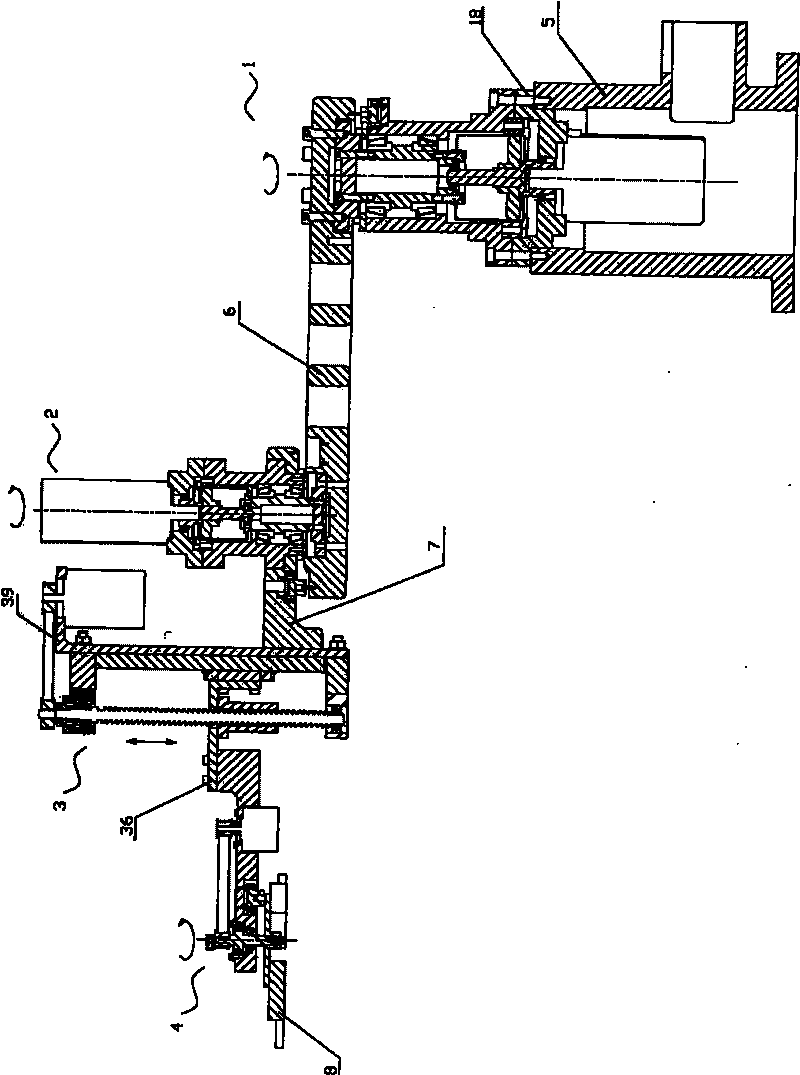
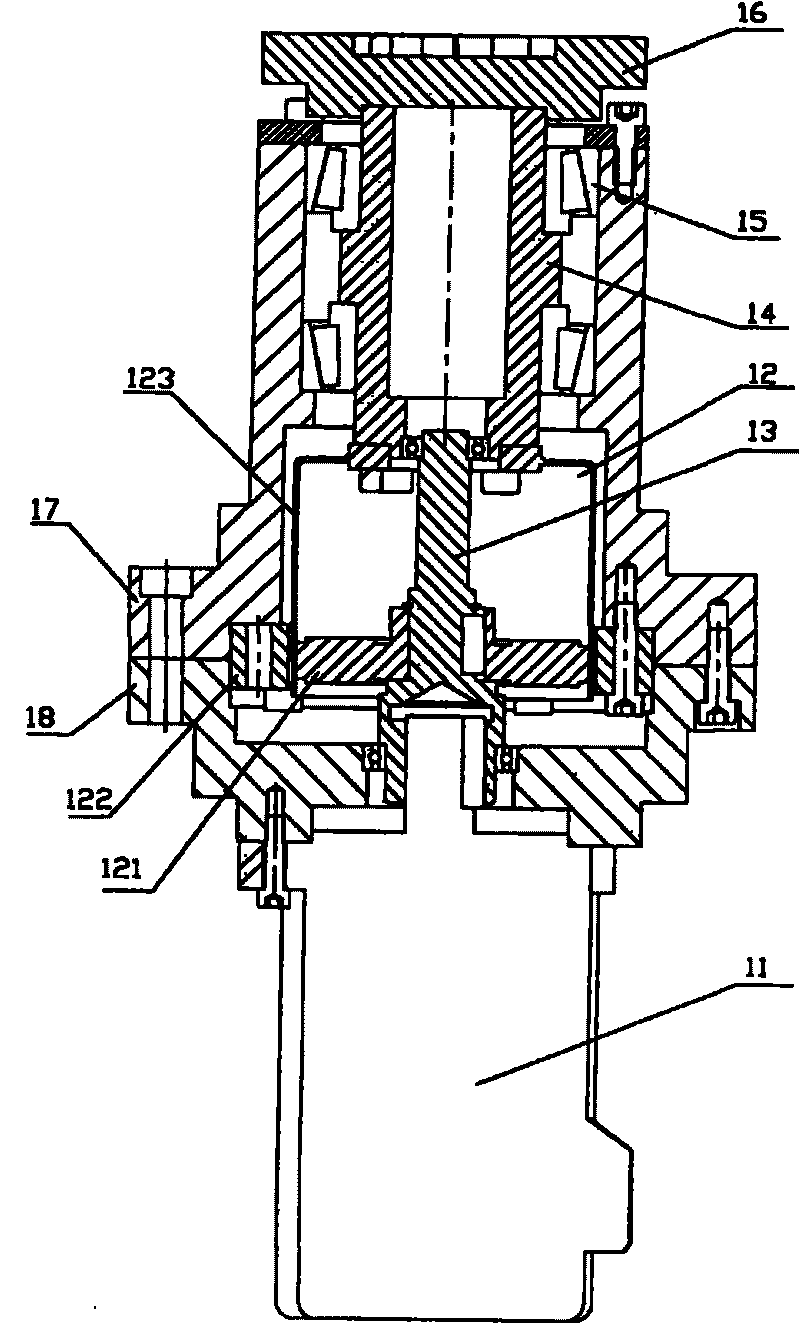
[0022] Such as figure 1 As shown, the mechanical structure of the punching machine loading and unloading robot includes: a first joint 1 , a second joint 2 , a third joint 3 , a fourth joint 4 , a base 5 , a first arm 6 , a second arm 7 and an end effector 8 . The first joint 1, the second joint 2, and the fourth joint 4 have rotational degrees of freedom, and the third joint 3 has vertical translational degrees of freedom. The first joint input housing 18 and the first joint output housing 17 of the first joint 1 are fixed on the base 5 together. The output end of the first joint 1 is fixed to one end of the first arm 6 , and the other end of the first arm 6 is connected to the input end of the second joint 2 . The output end of the second joint 2 is fixed to one end of the second arm 7 , and the other end of the second arm 7 is connected to the third join...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More