

Experimental system and method for augmented reality of teleoperation of robot
An experimental system and augmented reality technology, applied in the field of remote operation experimental system, can solve the problems of complicated installation, display, inconvenient use, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
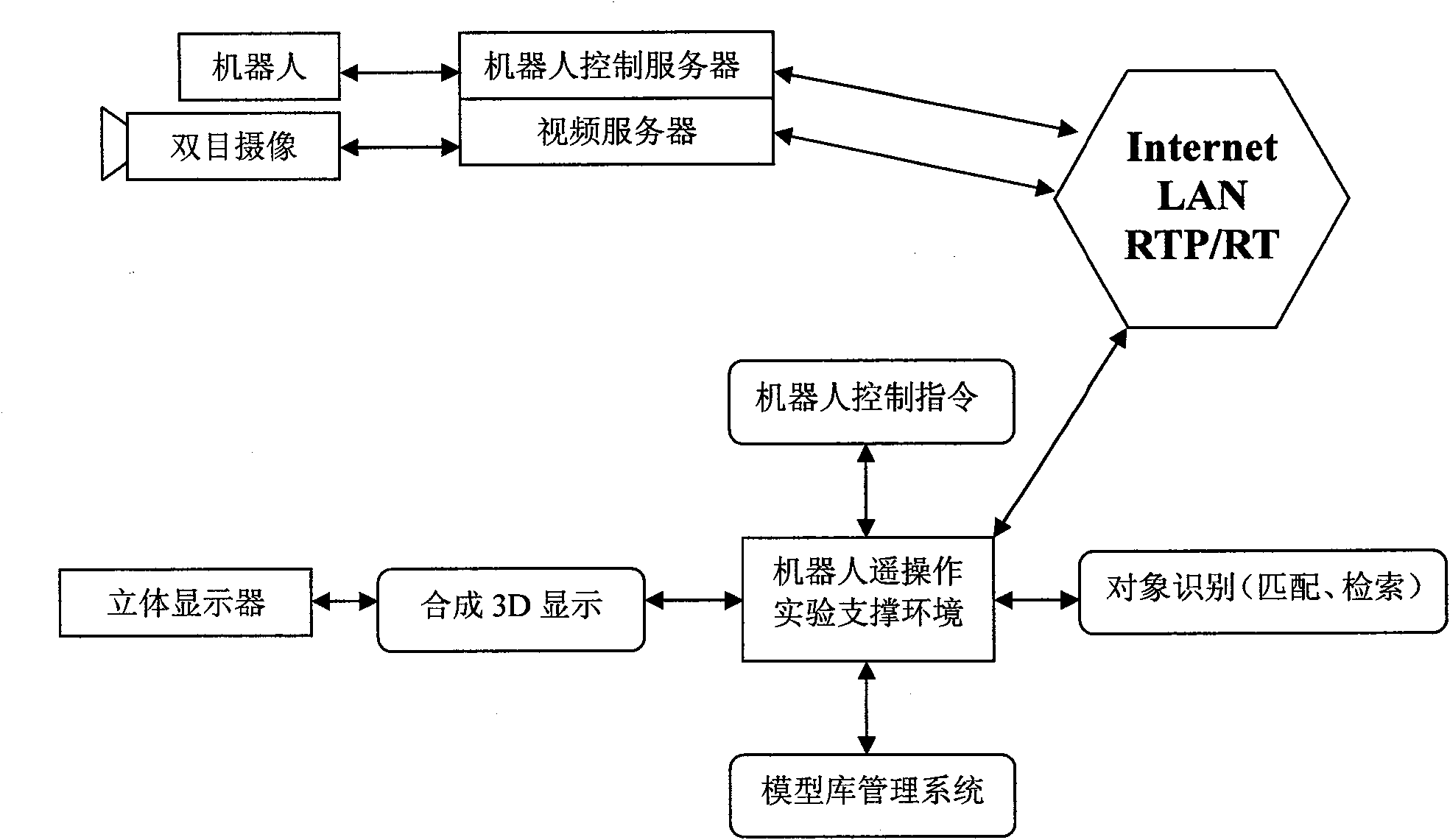
[0032] Such as figure 1 As shown, the robot remote operation experiment system of the present invention includes a robot, a binocular camera, a server, a client and a stereoscopic display,
[0033] 1. Robot: Realize specific operations such as grabbing objects.
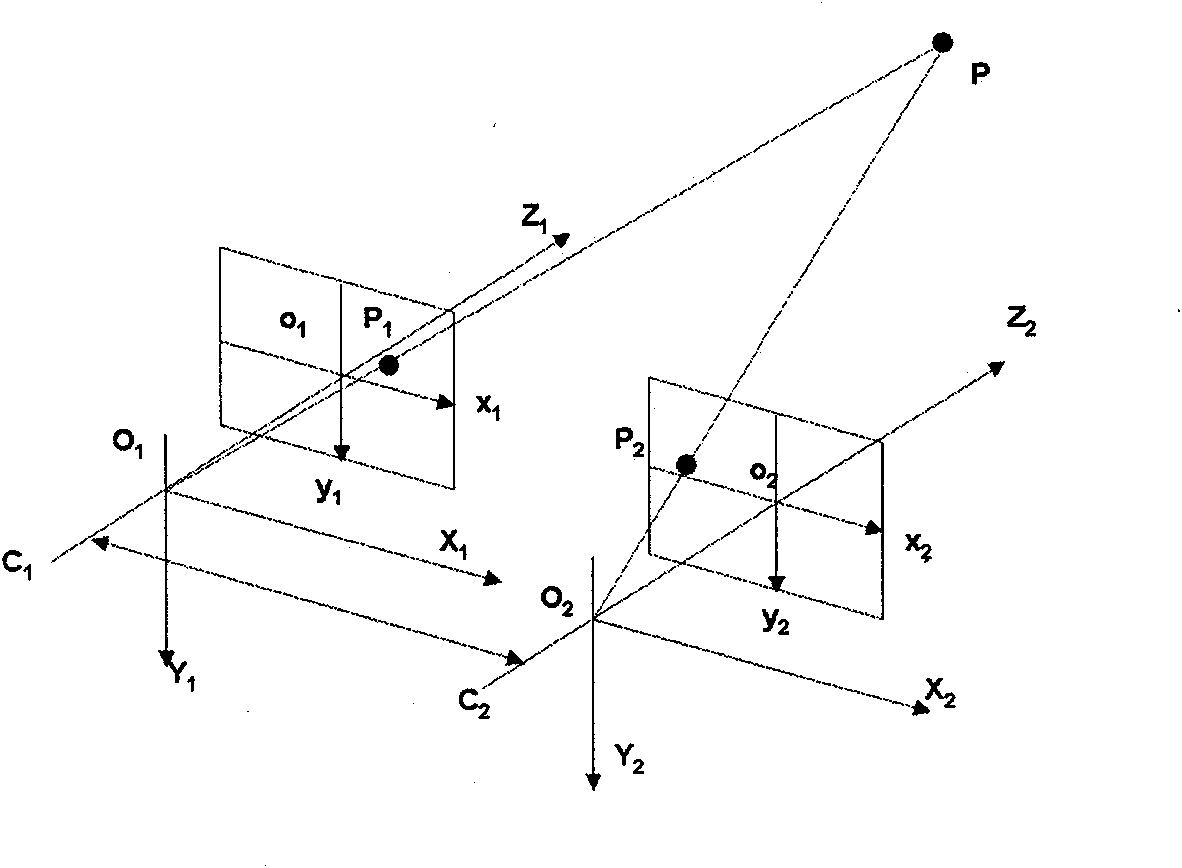
[0034] 2. Binocular camera: used to obtain scene data and output dual video streams.
[0035] 3. Server: including robot control server and video server, in which the robot control server receives the feedback of robot attitude parameters and sends out robot control commands; the video server performs filtering / compression and sending processing on the left and right camera videos.
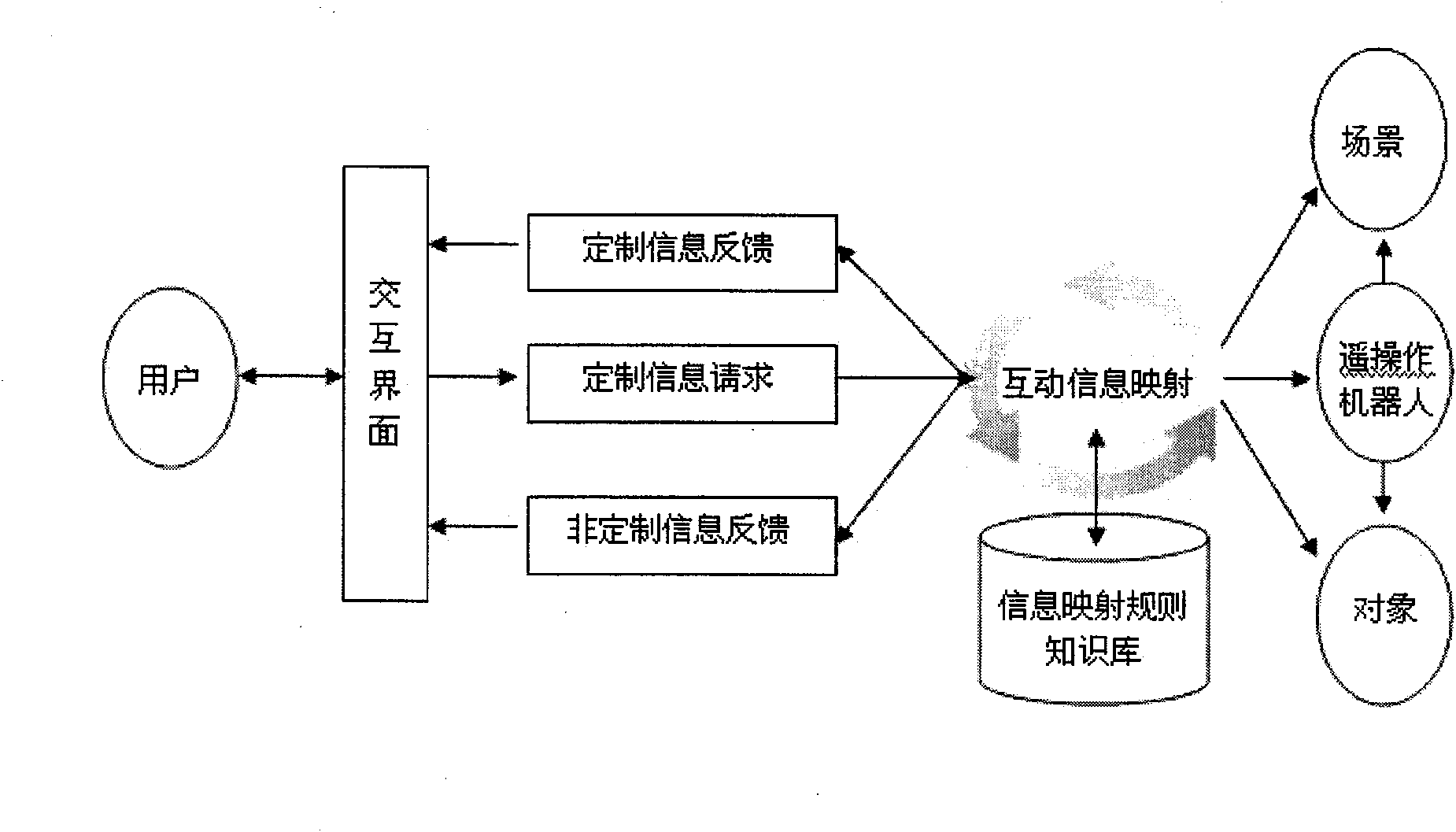
[0036] 4. Client: Log in to the server for remote operation.
[0037] 5. Stereoscopic display: Realize two-way visual dynamic stereoscopic display.
[0038] The client is connected to a model database, which stores the models of the shapes and attributes of common objects or possible objects in teleoperation scenarios.
[0039] combin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More