

Intelligent control method for hydraulic excavator
A hydraulic excavator, intelligent control technology, applied in the direction of mechanically driven excavator/dredger, program control, general control system, etc. Re-disassembly and other problems to achieve the effect of improving the control performance and operation ability, the default parameters are accurate and comprehensive, and the operation performance is improved
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
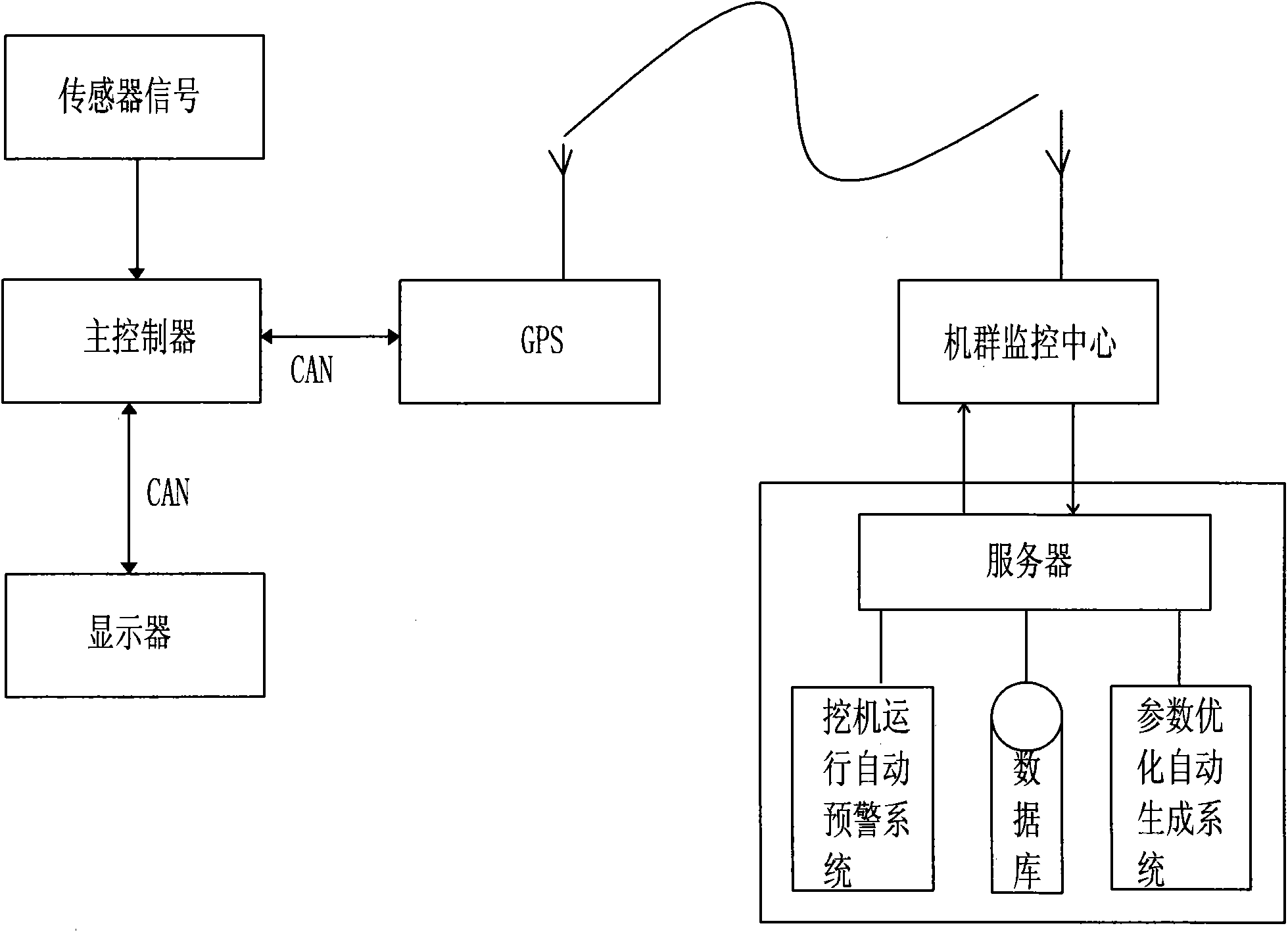
[0035] Embodiment one: see Figure 1~3As shown, an intelligent control method for a hydraulic excavator, the database set in the main controller is divided into a setting area and a recovery area, and the factory default data are stored in the setting area and the recovery area respectively, and the main controller Connect with the display modification interface through the CAN bus, the operation method is as follows:
[0036] a. Data modification:
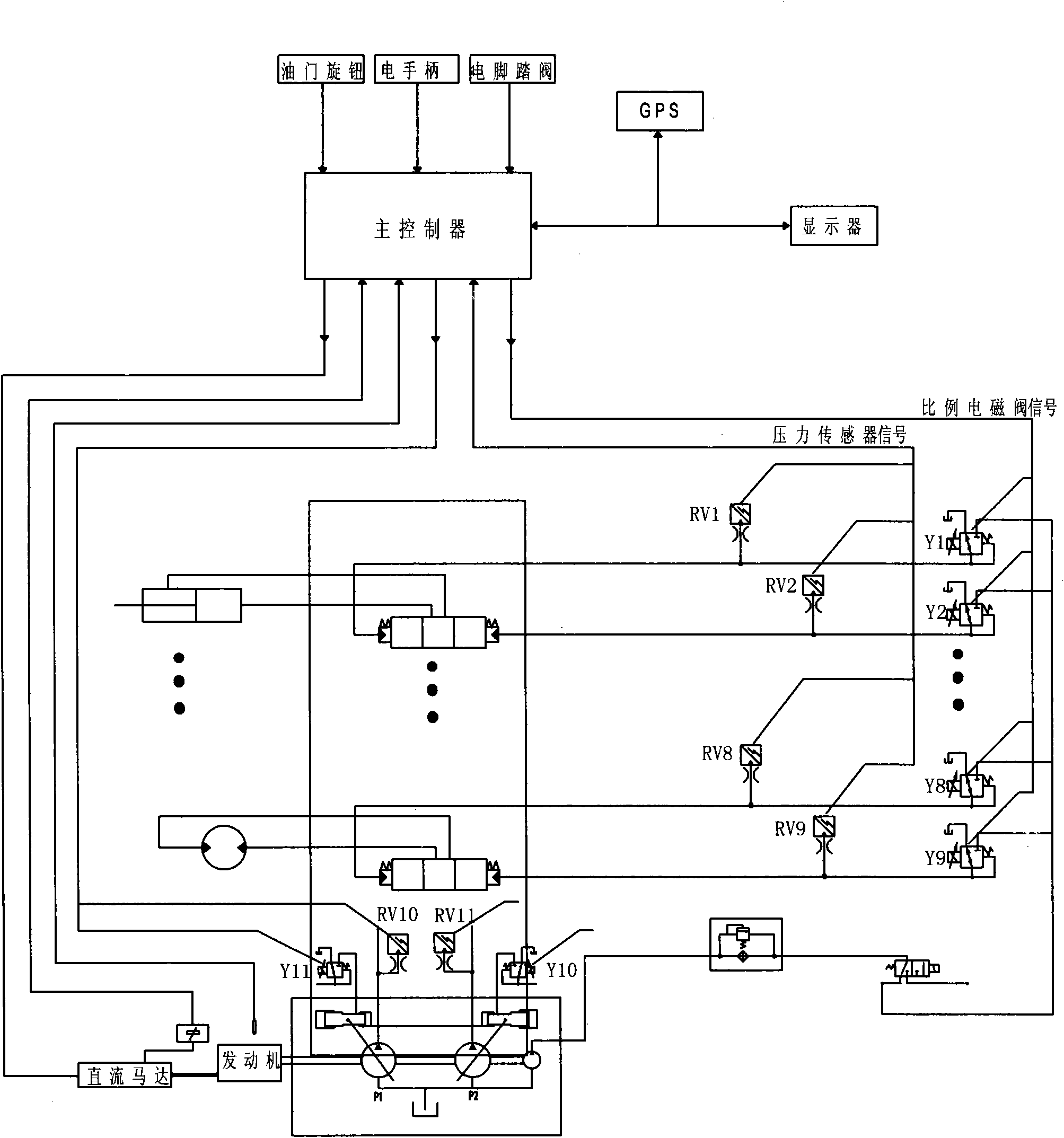
[0037] (1) The main controller detects data, such as figure 1 As shown, including handle signal, each pilot pressure sensor signal RV1~RV9 on the excavator, main pressure signals RV10, RV11 of the front and rear pumps, and ambient temperature sensor signal, the control parameters of the excavator and the adjustment range of the engine output power can be obtained through logical operation;
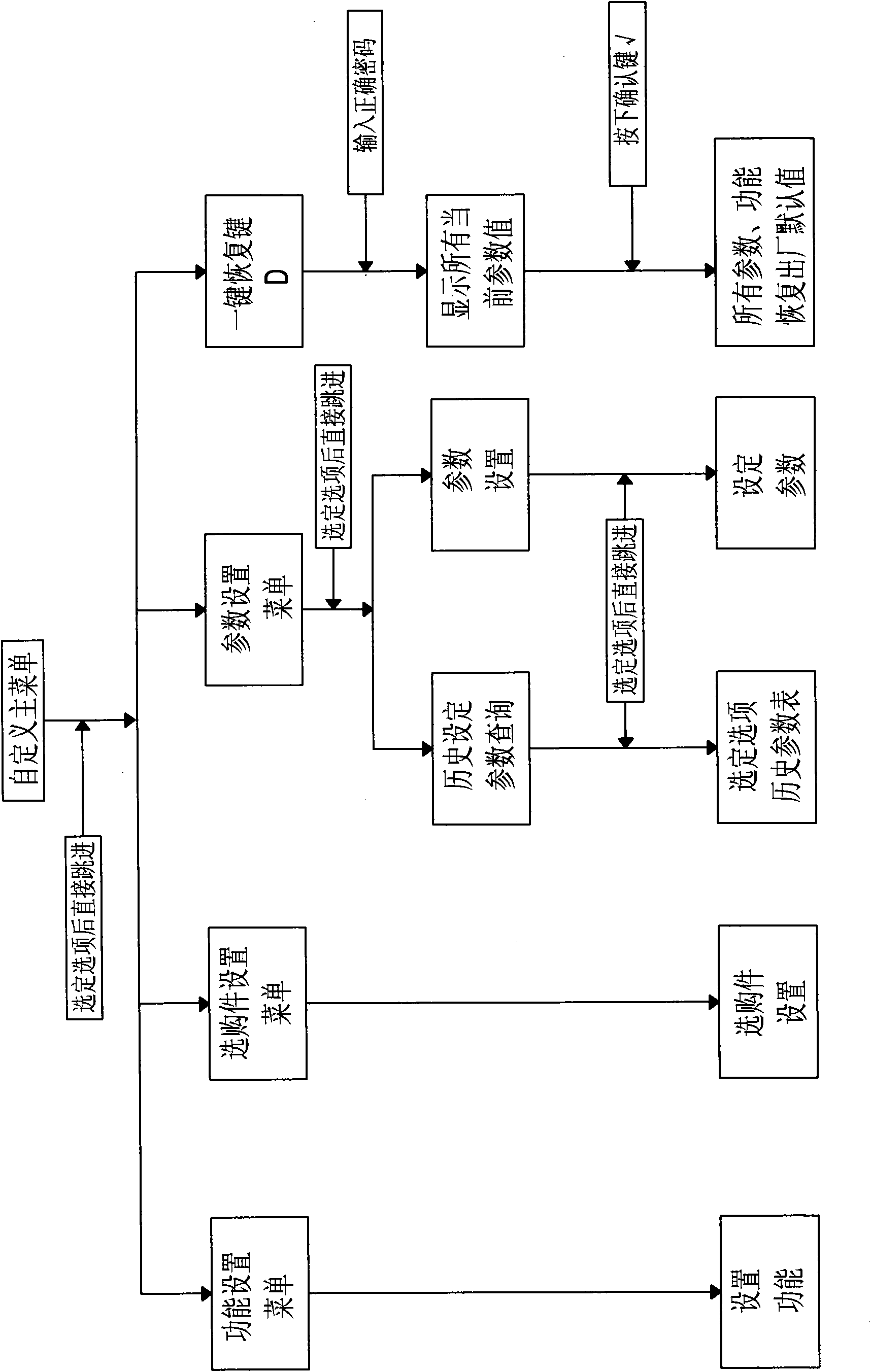
[0038] (2) The operator sets the control parameters of the excavator and the output power of the engine on the display modification interfa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More