

Identification and compensation method of servo system disturbance moment
A servo system and interference torque technology, applied in control systems, vector control systems, DC motor speed/torque control, etc., can solve problems such as difficulty in establishing friction models, low interference torque accuracy, and difficulty in estimating interference torque.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
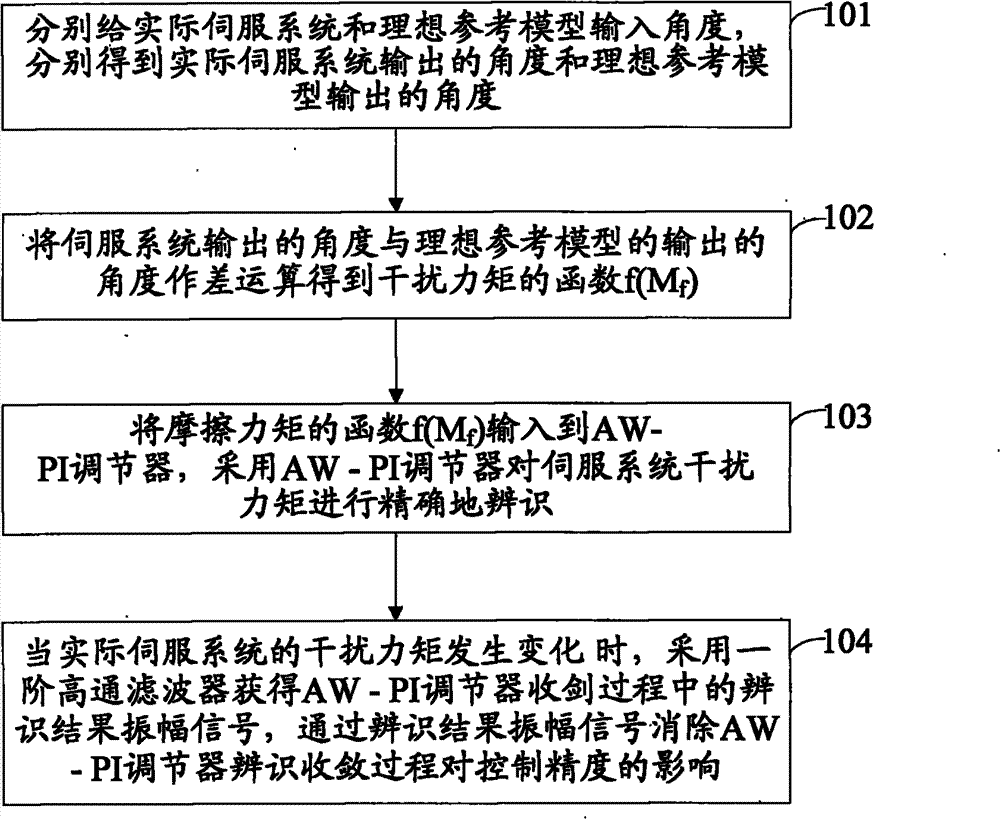
[0027] Such as figure 1 As shown, the embodiment of the present invention provides a servo system disturbance torque identification method, the method steps are as follows:
[0028] Step 101: Input the angle θ for the actual servo system and the ideal reference model respectively r (s), get the angle θ(s) output by the actual servo system and the angle output by the ideal reference model respectively
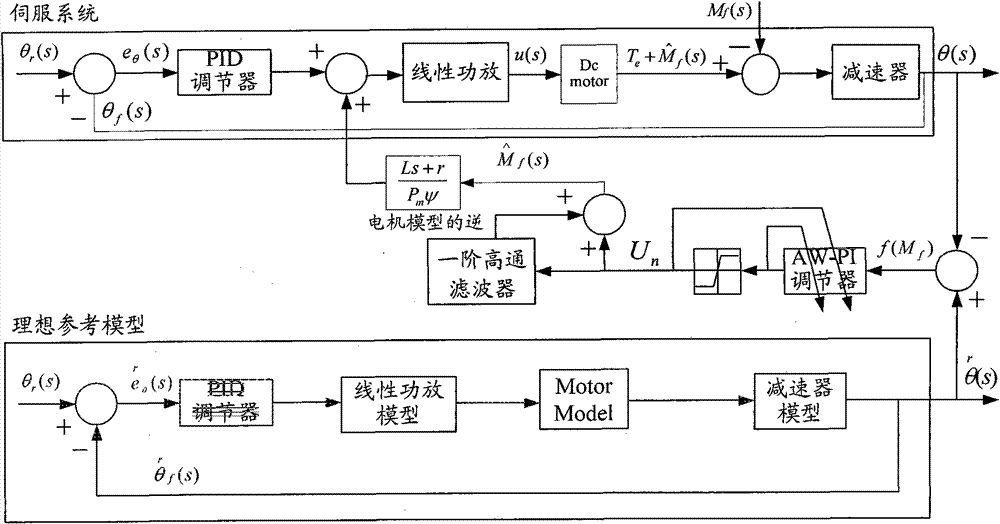
[0029] Among them, such as figure 2 As shown, the angle θ r (s) are respectively input into the actual servo system and the ideal reference model. There are disturbance torques in the actual servo system, which will reduce the accuracy of the servo system, while the ideal reference model is a servo system model with high precision and no disturbance torque. Therefore, the actual The angle θ(s) output by the servo system and the angle output by the ideal reference model There is bound to be a discrepancy between them.
[0030] Among them, the disturbance torque is the fr...
Embodiment 2
[0054] Such as Figure 5 As shown, the embodiment of the present invention provides a method for compensating the disturbance torque identified in embodiment 1, including:
[0055] Step 201: The identified disturbance torque Multiply with the coefficient of the inverse motor model, and add the obtained value to the voltage signal u(s) of the actual servo system to obtain the compensated voltage signal;
[0056] Among them, the coefficients of the inverse motor model are Among them, Ls, r, P m and ψ are parameters of the inverse motor model, and each parameter value is determined by the model.
[0057] Step 202: Input the compensated voltage signal into the DC motor of the actual servo system to drive the DC motor to output torque
[0058] Among them, the coefficient of the compensated voltage signal and the DC motor Multiplied together, the output torque of the DC motor is
[0059] Among them, the compensated voltage signal obtained by multiplying the identified d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More