

Fuzzy control-based high-dynamic GPS receiver carrier tracking loop
A GPS receiver and carrier tracking loop technology, applied in the field of navigation, can solve the problems of insufficient coordination dynamic performance and noise suppression ability, and achieve the effects of improving steady-state control accuracy, shrinking the domain of discussion, and fast and accurate tracking
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be described in detail below in conjunction with the accompanying drawings.
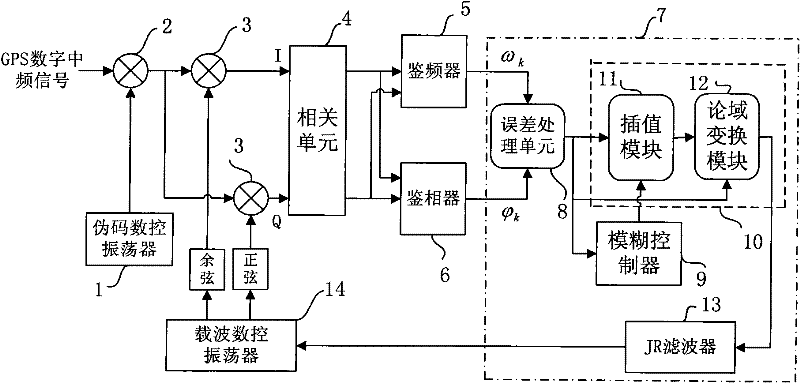
[0036] A kind of high dynamic GPS receiver carrier tracking loop based on fuzzy control of the present invention, as figure 1 As shown, it mainly includes a pseudocode digitally controlled oscillator 1, a despreader 2, a mixer 3, a correlation unit 4, a frequency discriminator 5, a phase detector 6, an intelligent loop filter 7 and a carrier digitally controlled oscillator 14.
[0037] Pseudo-code numerical control oscillator 1 generates local C / A code sequence, despreader 2 performs correlation calculation on C / A code sequence and GPS digital intermediate frequency signal, strips the modulated pseudo-code data in GPS digital intermediate frequency signal, and obtains despread GPS digital intermediate frequency signal.
[0038]The carrier numerically controlled oscillator 14 generates a sine carrier signal and a cosine carrier signal, and the despread GPS digital in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More