

Two-degree of freedom fictitious force feedback device capable of being divided into single-degree of freedom teleoperation devices
A feedback device and a technology of degrees of freedom, applied in the input/output of user/computer interaction, computer components, graphics reading, etc., can solve the problem of driving capacity, that is, the limitation of output power, the reduction of net load capacity, and the reduction of use efficiency, etc. problems, to achieve the effect of reducing detection information transmission cables, increasing net load capacity, and improving and authenticity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
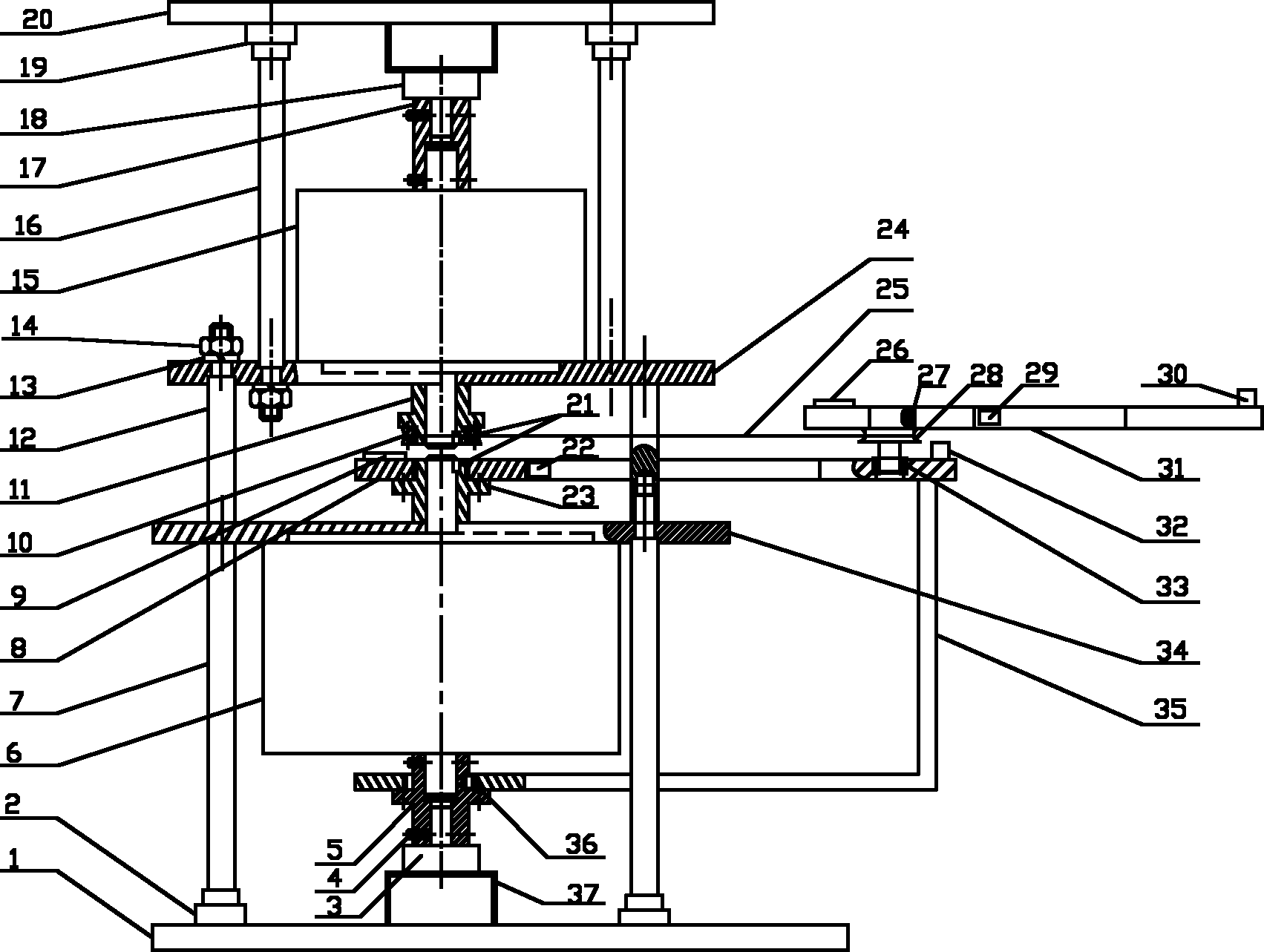
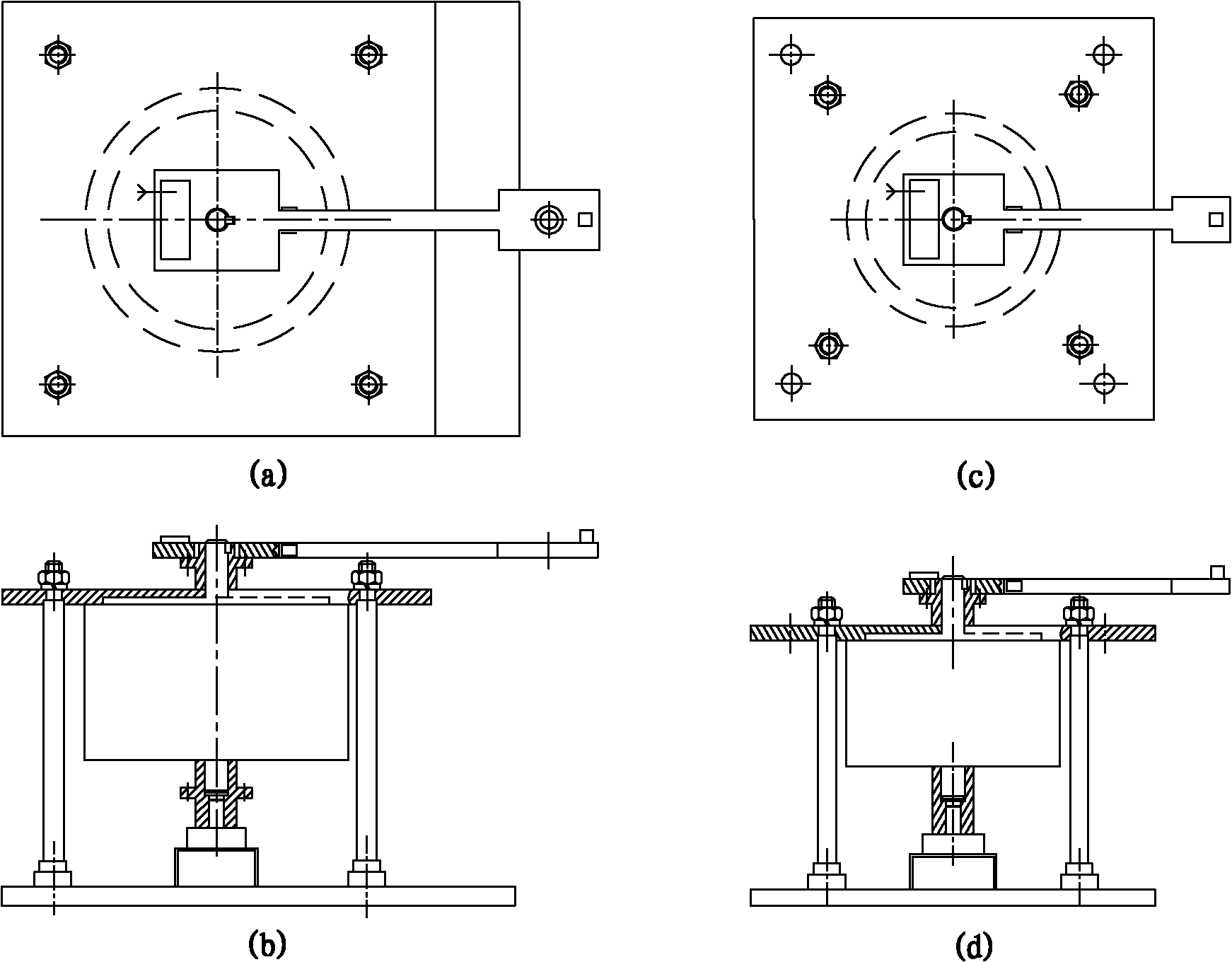
[0036] Such as figure 1 and Figure 6 , in the two-degree-of-freedom virtual force feedback system, the structure of the large-scale force feedback subsystem (that is, the large torque motor-single swing arm subsystem) is shown in the figure. Two square steel plates with different sizes are respectively used as the bottom plate 1 and the panel (large) 34 of the stand, and the plate 1 and the plate 34 are connected by four round columns 7 which are symmetrical in front and back and asymmetrical in left and right and positioned on the center line of the panel to form the installation stand. The large torque motor 6 (110LYX03 type rare earth permanent magnet DC torque motor) is suspended and fixed in the stand close to the bottom surface of the panel 34, and its axis line is perpendicular to the panel and is located at the center of the panel. The first coupling sleeve 23 that is fixed by the first key 21 is housed on the large torque motor rotating shaft that exposes panel 34, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More