

Multi-joint creeping high-altitude cleaning robot
A cleaning robot and robot technology, applied in the field of cleaning robots, can solve the problems of difficulty in moving and cleaning across obstacles and surface-to-surface conversion, high power consumption, and bulky volume.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] Below in conjunction with accompanying drawing and embodiment the present invention is described in further detail:
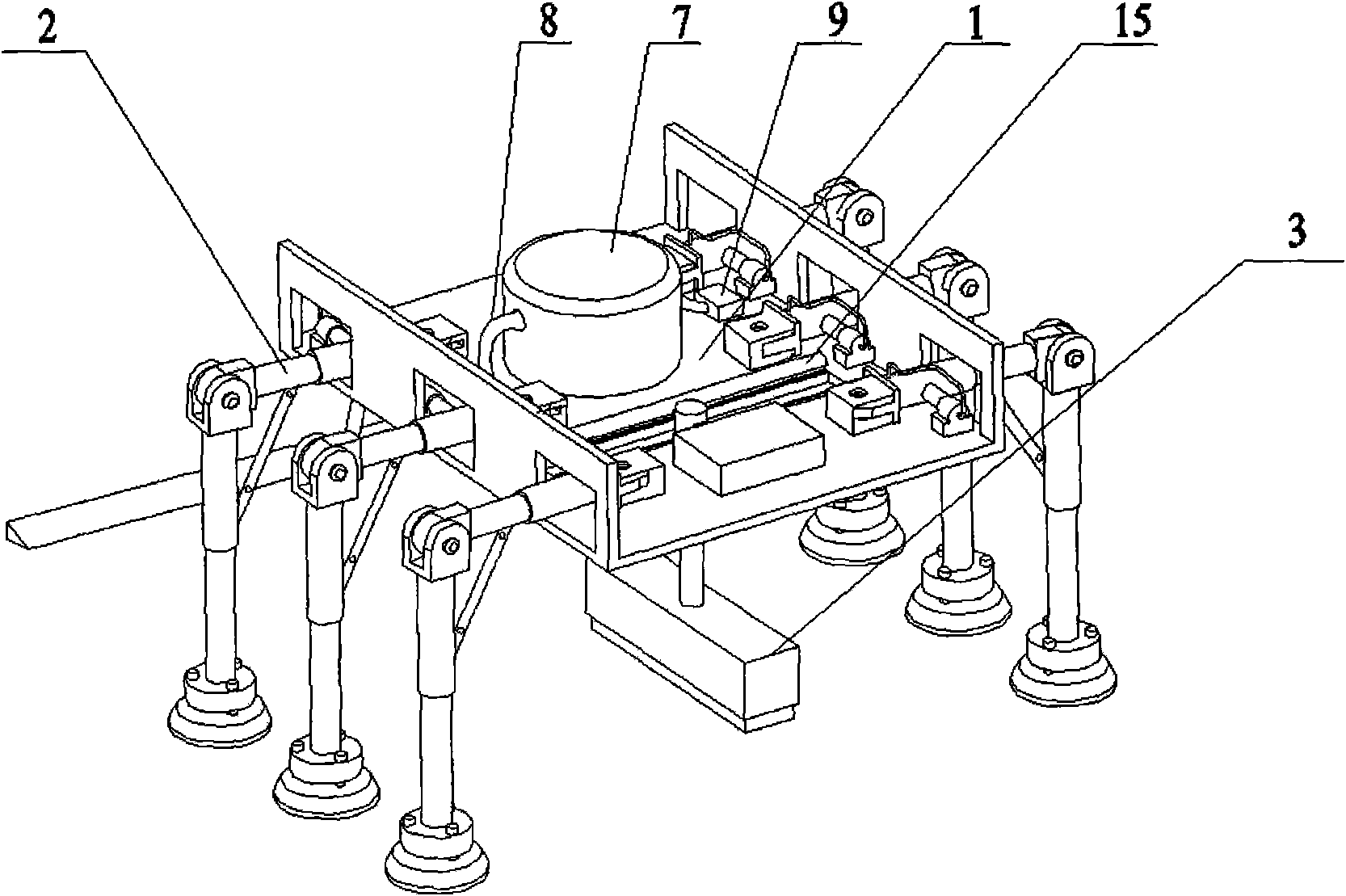
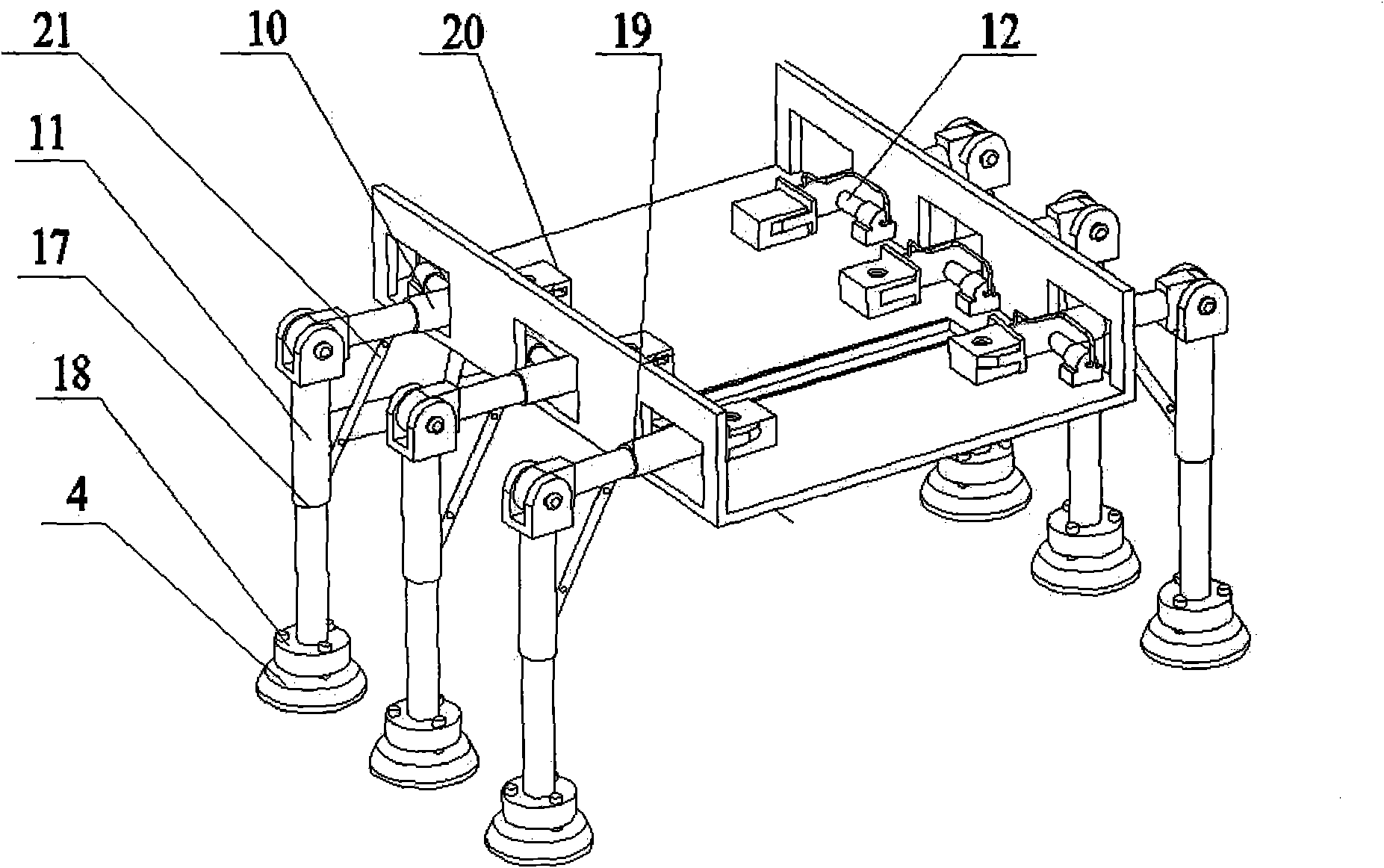
[0028] figure 1 It is a structural schematic diagram of a multi-joint crawling high-altitude cleaning robot, including a robot body (1), a crawling part (2) and a cleaning part (3); the robot body includes an adsorption system and an air source system, which are installed on the robot body (1 ) on the bottom plate; the crawling part (2) is composed of six feet with three joints, which are evenly distributed on both sides of the robot body, and each foot is hinged with the bottom plate of the robot body (1); The cleaning part (3) comprises a central cleaning system and a rear cleaning system, wherein the cleaning system in the middle is installed under the bottom plate of the robot fuselage (1), and the rear cleaning system is fixed on the afterbody of the robot fuselage (1).
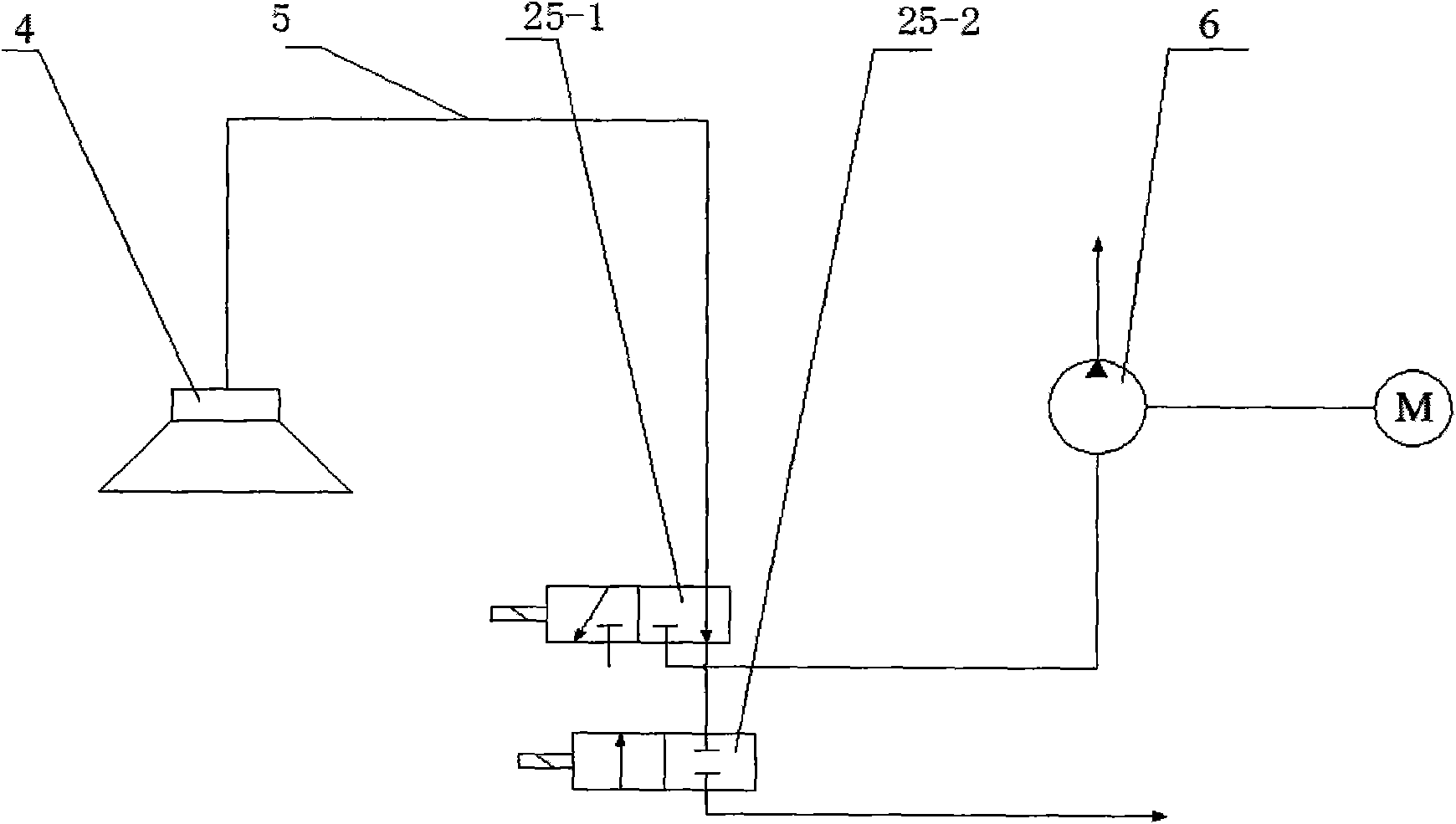
[0029] Adsorption system comprises sucker (4), vacuum tube (5) and vacuum pum...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More