

Manual operating device for bone surgery assisted robot
A manipulator and orthopedic surgery technology, applied in the field of robotics, can solve the problems of increasing the risk of mixed manipulation of movement and rotation, easily causing major accidents, and not mentioning the control method, so as to facilitate collaborative work and reduce the chance of misoperation Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The embodiments of the present invention are described in detail below. This embodiment is implemented on the premise of the technical solution of the present invention, and detailed implementation methods and specific operating procedures are provided, but the protection scope of the present invention is not limited to the following implementation example.
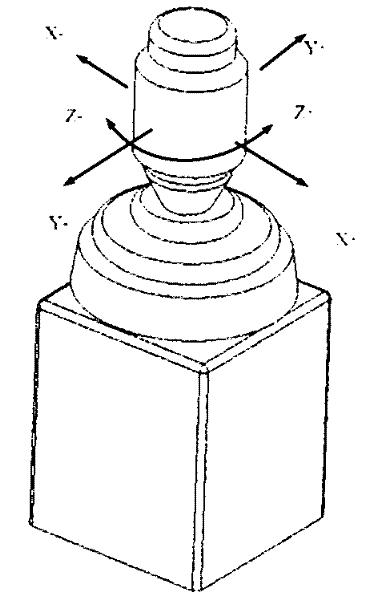
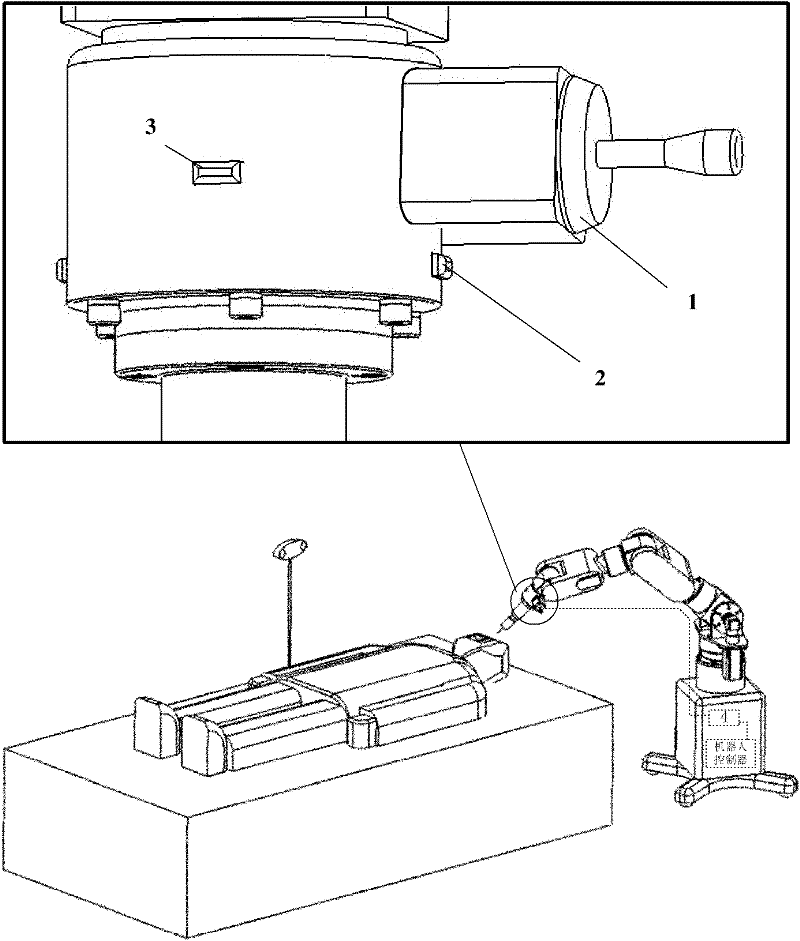
[0021] Such as Figure 1-Figure 3 As shown, it includes a three-degree-of-freedom joystick 1 , a mode selection switch 2 , a redundant attitude control switch 3 and a signal processor 4 connected to the robot control through signal cables.
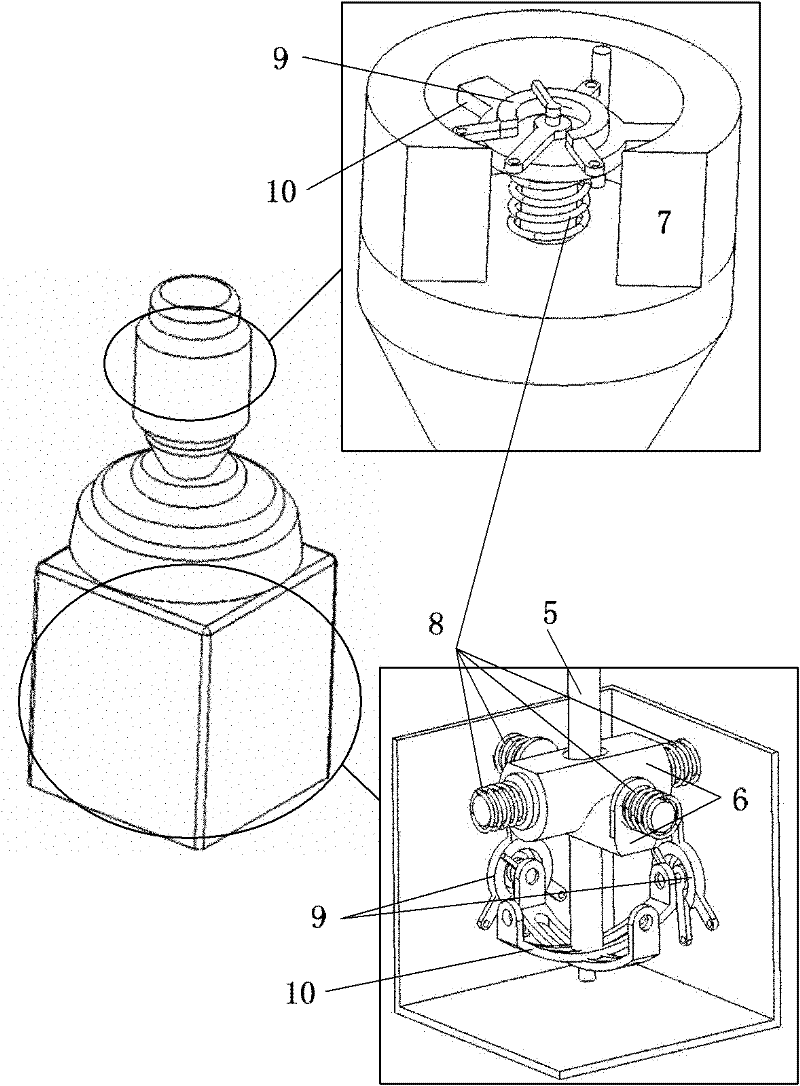
[0022] The three-degree-of-freedom joystick 1 is installed on the side of the end of the mechanical arm close to the chief surgeon. The three-degree-of-freedom joystick 1 includes: a handle 5, a rotating shaft 6, a knob 7, a spring return device 8, three sets of potentiometers 9 and corresponding The connecting mechanism 10, wherein: the two mutually perpendicular rotating sha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More