

Device and method for controlling micro underwater robot
A technology of a control device and a control method, applied in electrical program control, program control in sequence/logic controllers, manipulators, etc., can solve the problems of high cost of joysticks and buttons, and achieve light weight, low price, and low power consumption. consumption effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be described in further detail below in conjunction with the accompanying drawings.
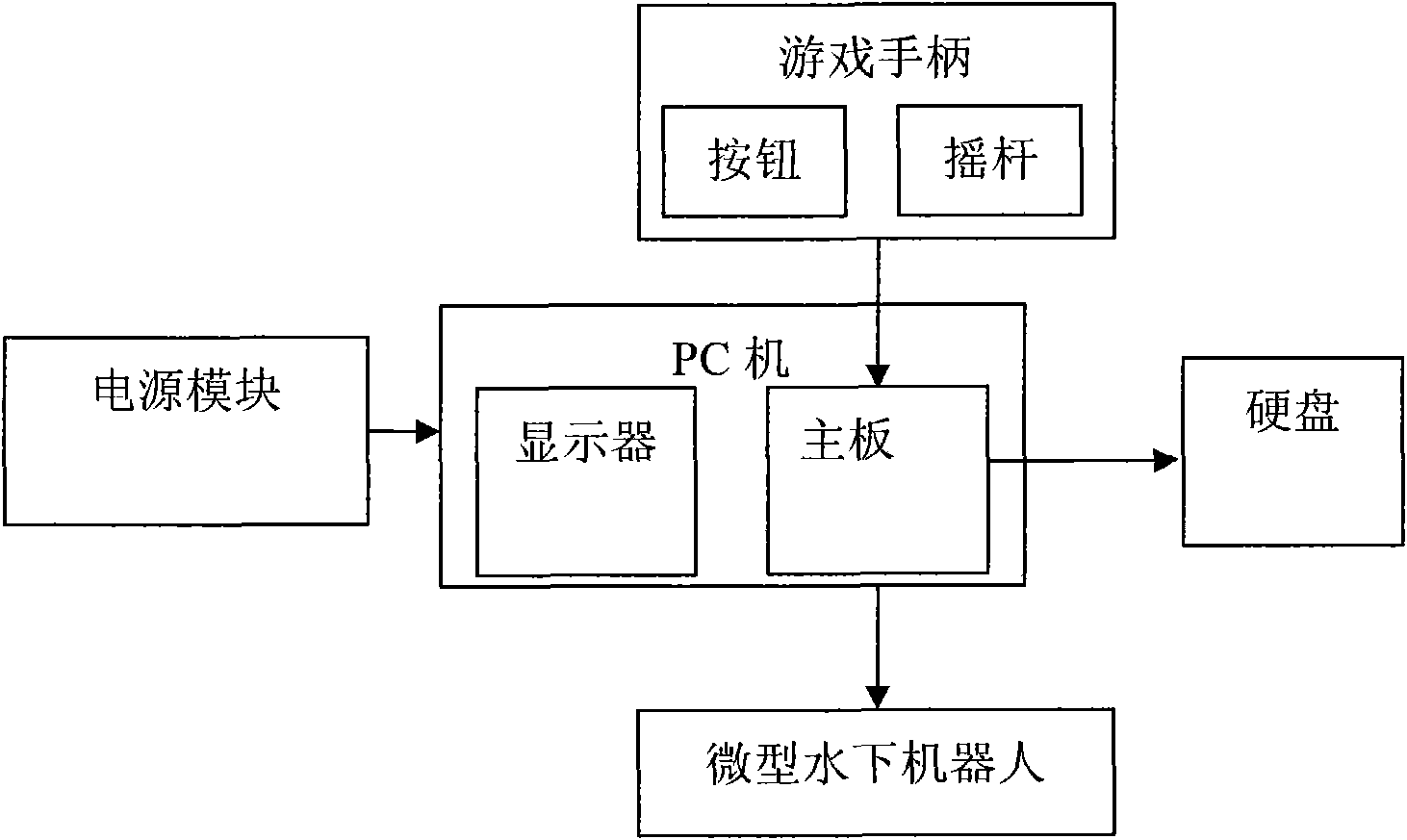
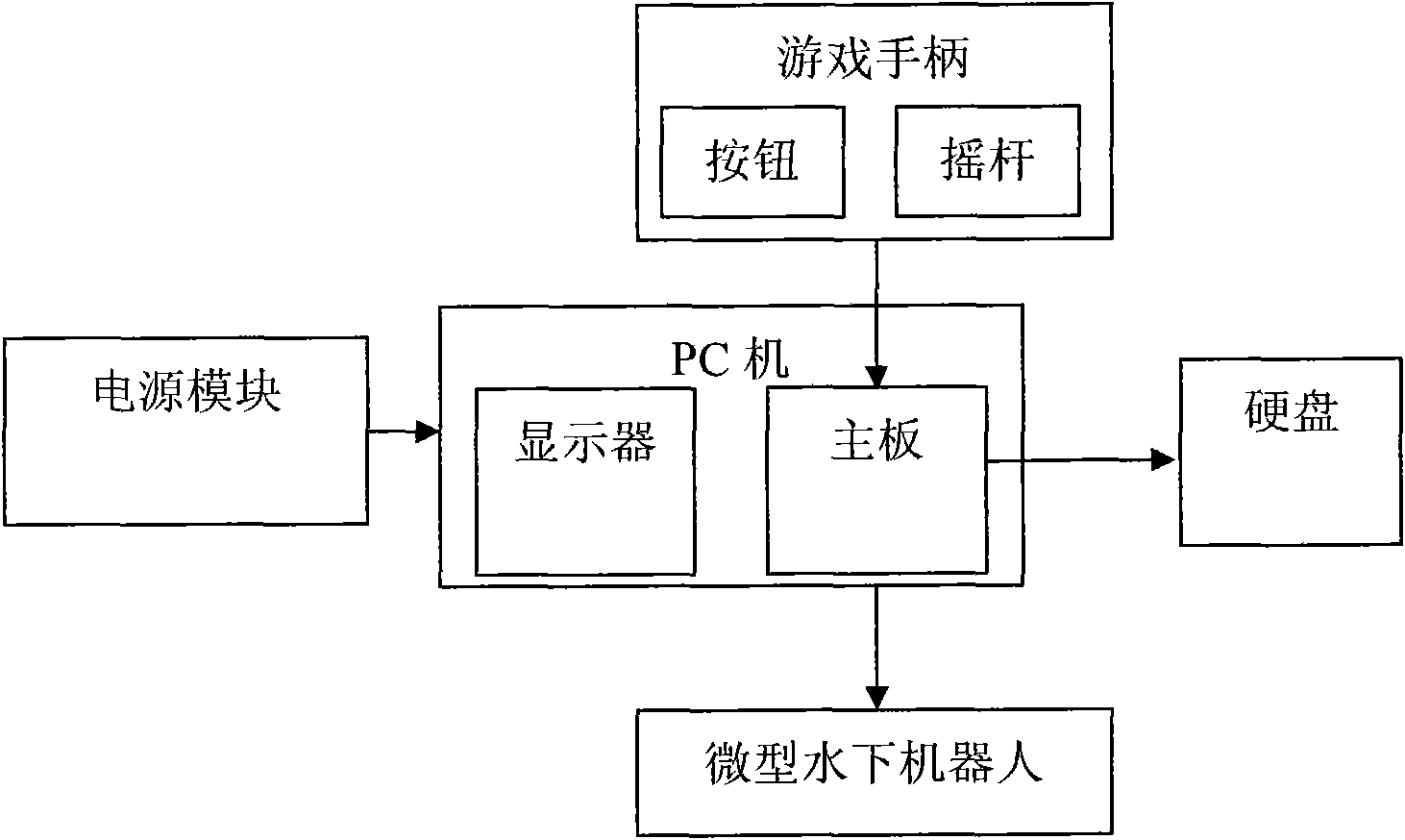
[0016] Such as figure 1 As shown, a control device for a miniature underwater robot of the present invention includes a joystick, a PC and a mobile hard disk; the joystick is a game handle including a button and a rocker, and is connected to the input end of the PC through a USB interface to provide the PC with Control quantity data, the output end of the PC is connected with the micro underwater robot through the control cable, and the output end of the PC is also connected with the mobile hard disk through the USB interface; wherein, the PC is provided with a main board, and the joystick is connected with the main board through the USB interface. The main board is connected to the mobile hard disk through the USB interface; there is also a control program in the PC for timing collection, reading and analysis of control data, and a monitor is also installed ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More