

Small-sized underwater robot combined navigation system and navigation method
A combined navigation system and underwater robot technology, applied in navigation calculation tools, navigation through velocity/acceleration measurement, etc., can solve the problems of low accuracy, increased difficulty, and high outlier rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention is described in more detail below in conjunction with accompanying drawing example:
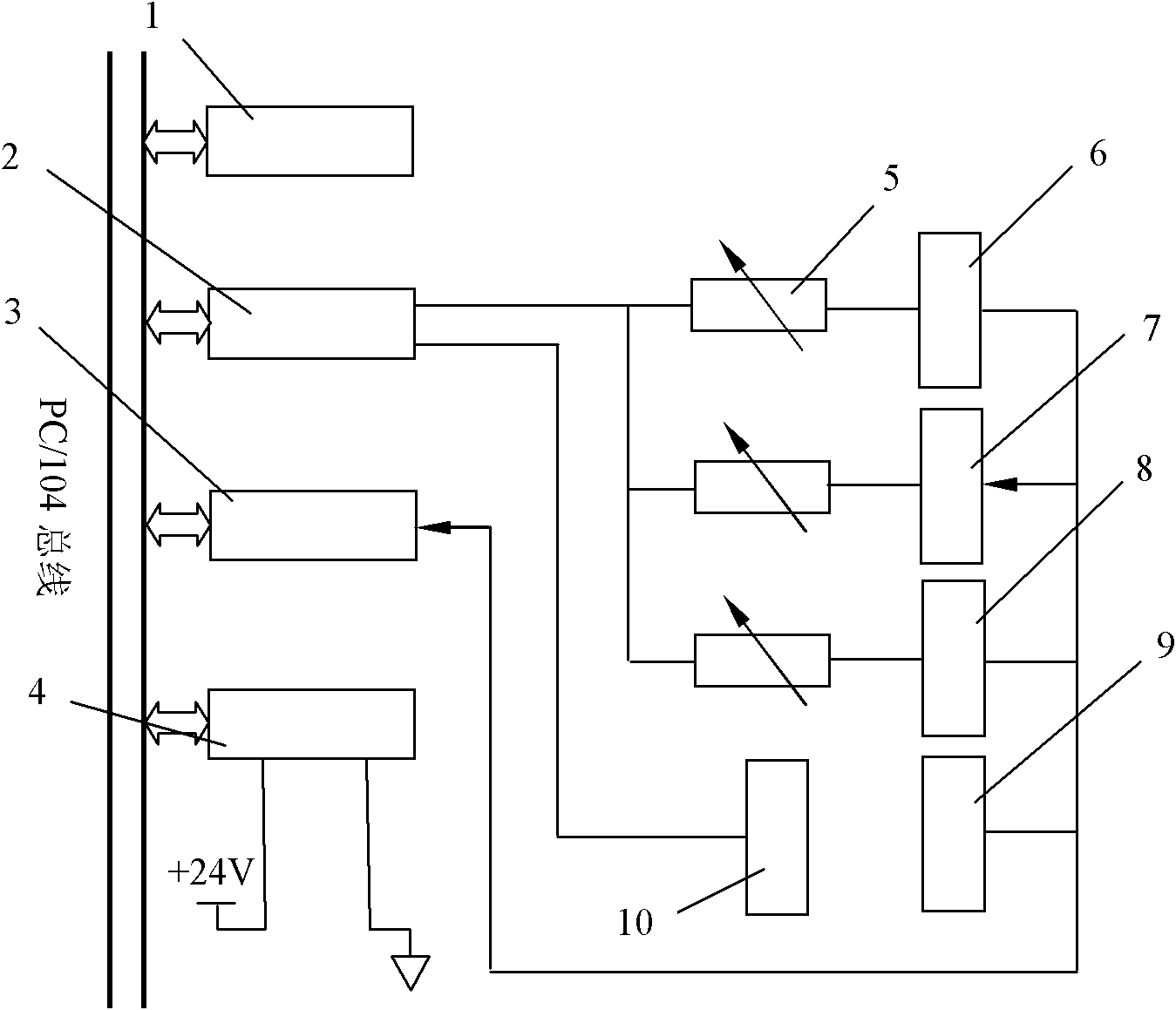
[0069] The small underwater robot navigation system consists of embedded navigation processor, pressure-resistant GPS, miniature attitude sensor, speedometer, depth gauge and relay components. Its structure is as follows: figure 1 shown. exist figure 1 Middle: 1 is the CPU core module, 2 is the AD board, 3 is the 4 serial port card, 5 is the relay, 6 is the GPS, 7 is the small speedometer, 8 is the underwater acoustic communication sonar, 9 is the small attitude sensor, 10 is the depth count.
[0070] The embedded navigation processor includes a CPU core module, AD board, 4 serial port cards, and a power board; the power board is powered by a 24V battery and supplies power to other boards through the PC / 104 bus; all board data information is transmitted through the PC / 104 bus.
[0071] The miniature attitude sensor is installed in the pressure-resistant cabin o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More