

Combined navigation and positioning method of small underwater robot
A technology that combines navigation and positioning methods, which is applied in navigation calculation tools, navigation through speed/acceleration measurement, etc., and can solve problems such as model mismatch of navigation and positioning systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be described in further detail below in conjunction with the accompanying drawings.
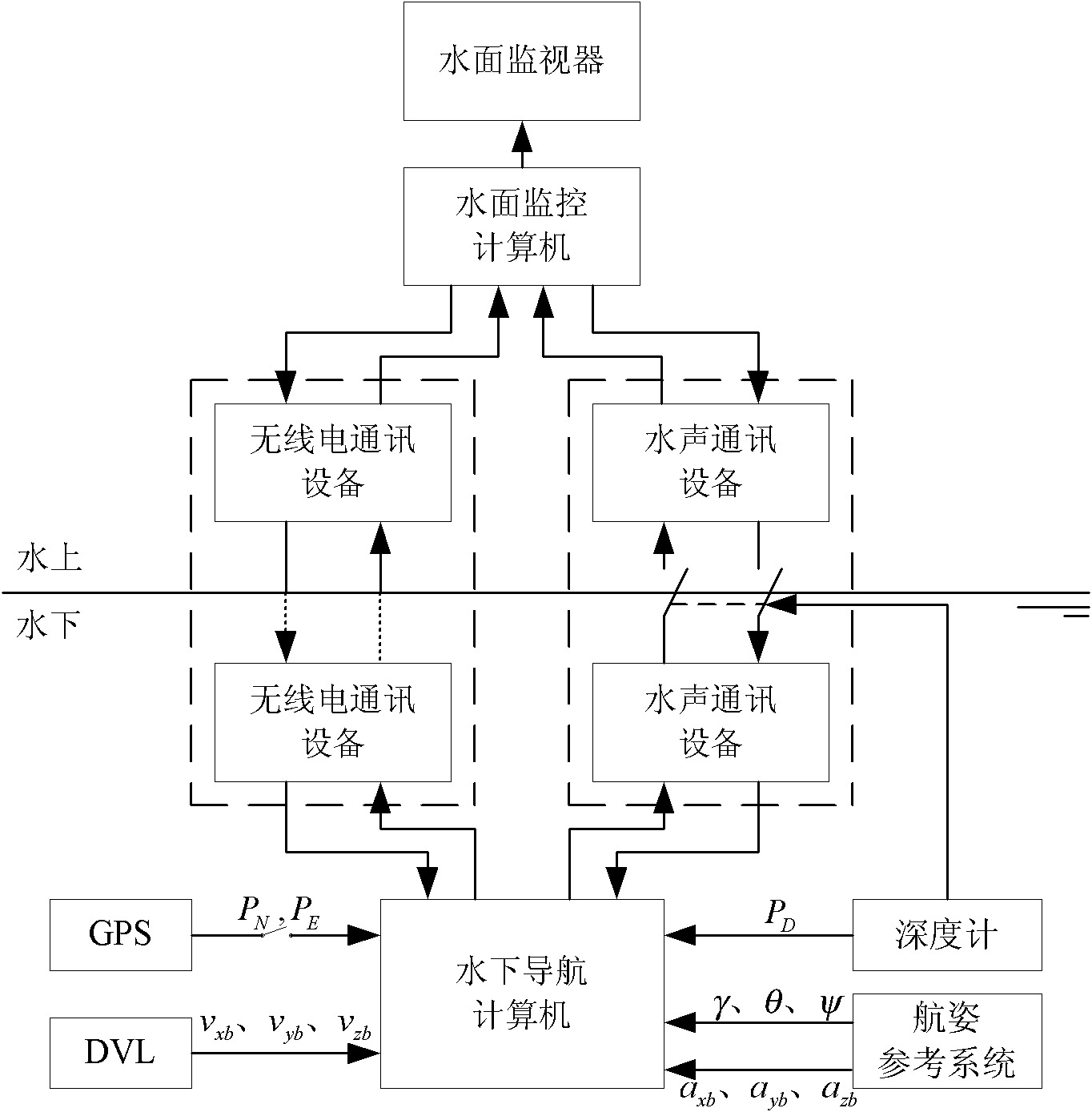
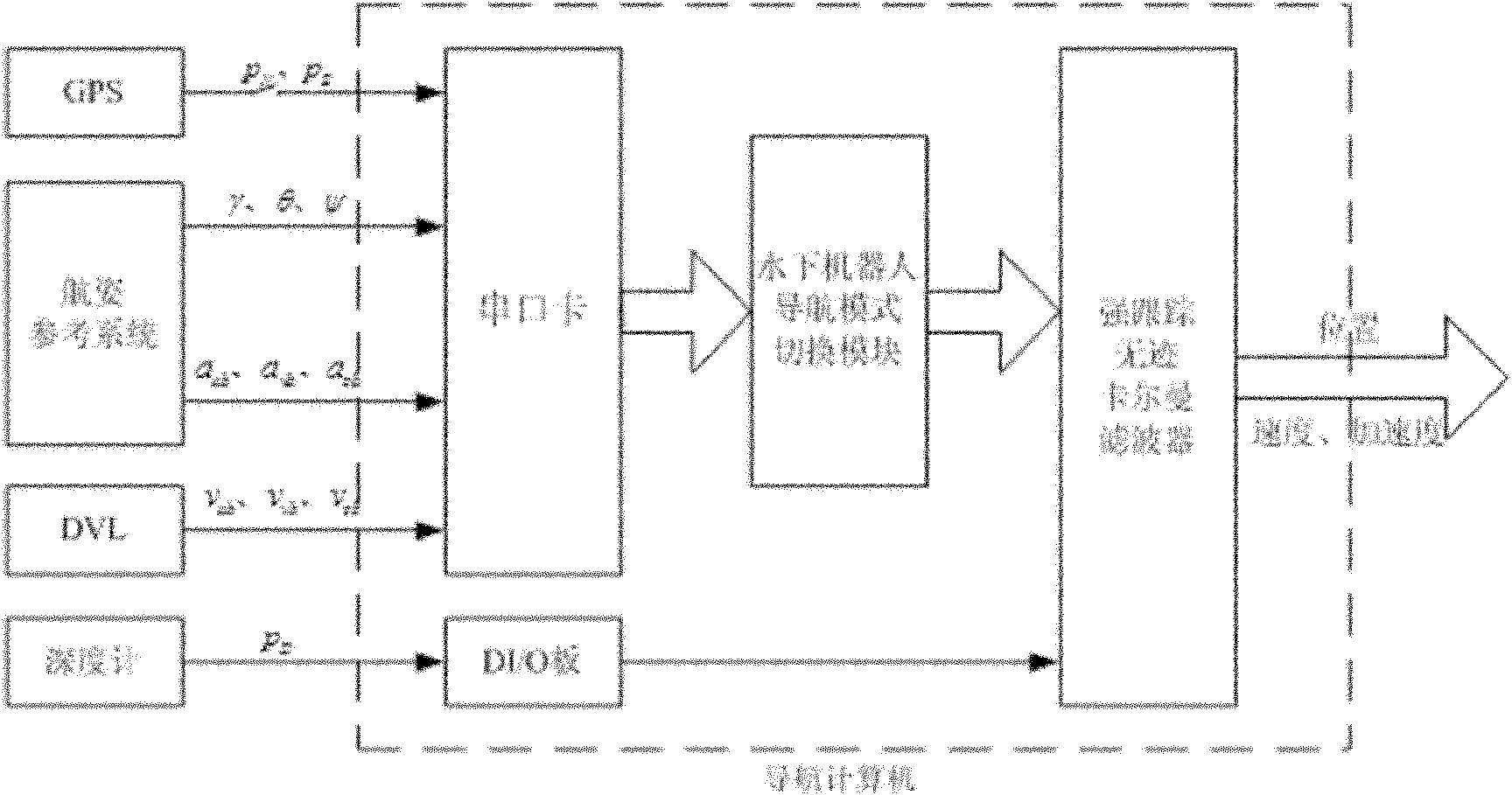
[0080] The underwater and underwater parts of the small underwater robot navigation and positioning system are as follows: figure 1 shown. The above water part includes: water surface monitoring computer (including upper computer data processing system, small underwater robot status information display system), underwater part system of underwater acoustics and radio communication equipment. The underwater part of the navigation and positioning system includes: embedded navigation computer, pressure-resistant GPS receiver, attitude reference system, Doppler speed measuring sonar, depth gauge, underwater acoustics and radio communication equipment. Among them, the attitude reference system consists of three MEMS gyroscopes, MEMS accelerometers, and magnetometers. The above sensors are all installed along the hull of the underwater robot, and are used to provi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More