

Robot behavior learning model based on utility differential network
A technique for learning models, differential networks
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described in detail with reference to the accompanying drawings and embodiments. Among them, the first embodiment specifically describes the offline learning process of the learning model of the present invention; the second embodiment describes the online decision-making process.
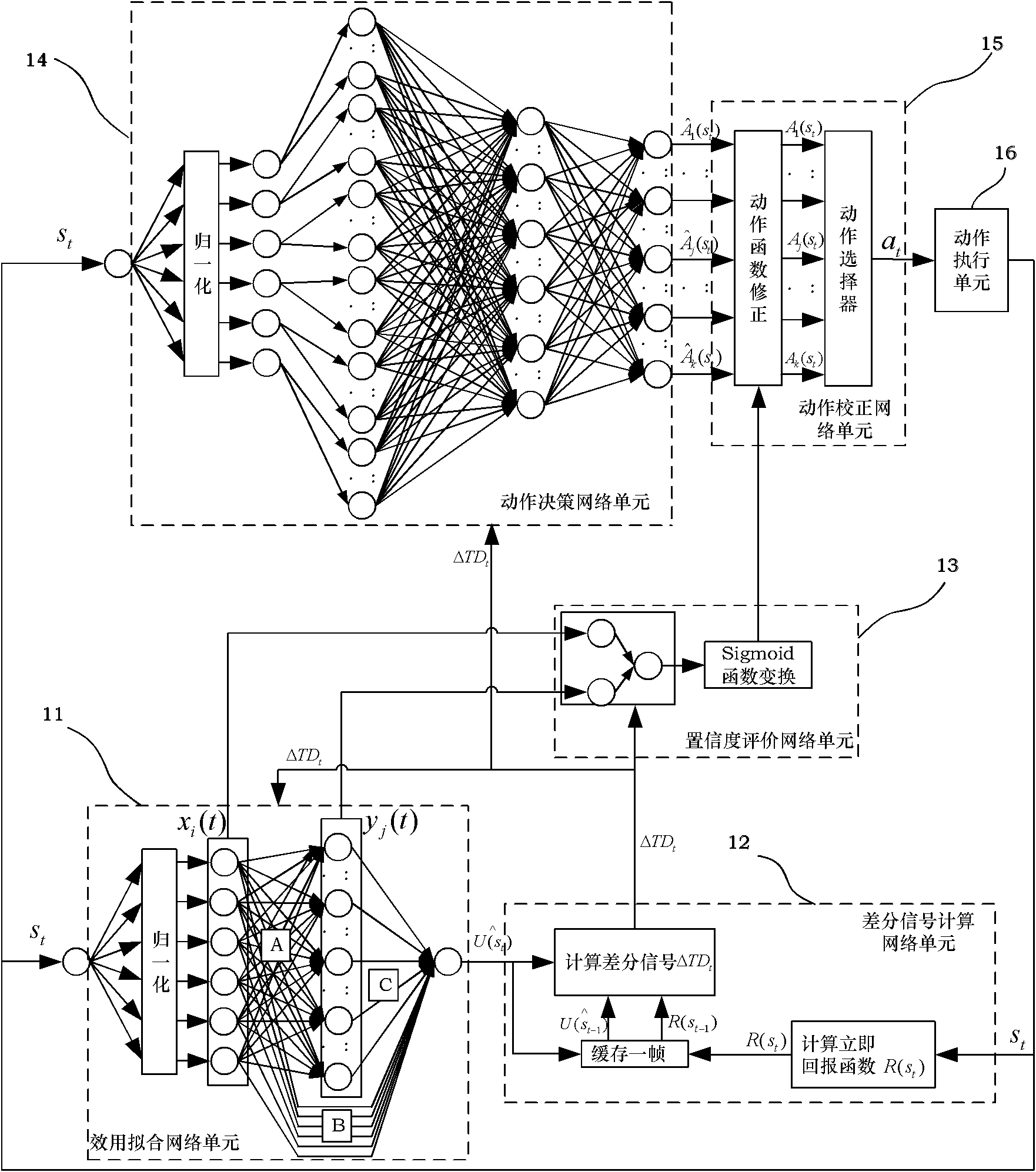
[0017] Such as figure 1 As shown, the learning model of the present invention includes five parts: a utility fitting network unit 11 , a differential signal calculation network unit 12 , a confidence evaluation network unit 13 , an action decision network unit 14 and an action correction network unit 15 . In the off-line learning process of the learning model of the present invention, five parts are all involved.
[0018] The utility fitting network unit 11 is used to calculate the action a selected at time t t The different state space vectors s generated after the execution of the action execution unit 16 t The resulting utility fitted value and o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More