

High-fineness urban three-dimensional modeling method
A technology of three-dimensional modeling and three-dimensional modeling of cities, which is applied in the field of three-dimensional digital city construction, can solve the problems of poor accuracy and fineness, low degree of digitalization, long cycle, etc., and achieve the effect of high precision and high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings.
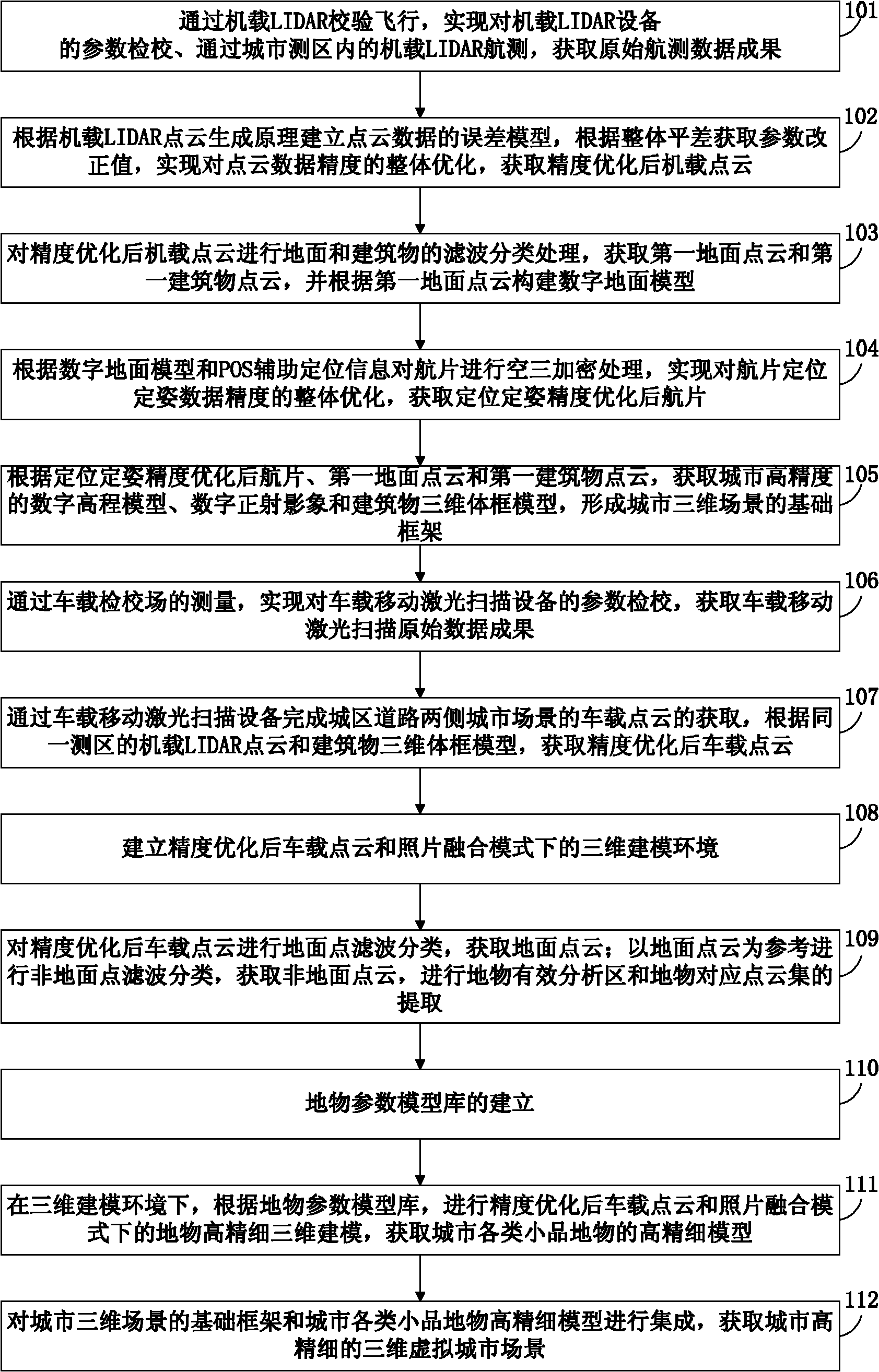
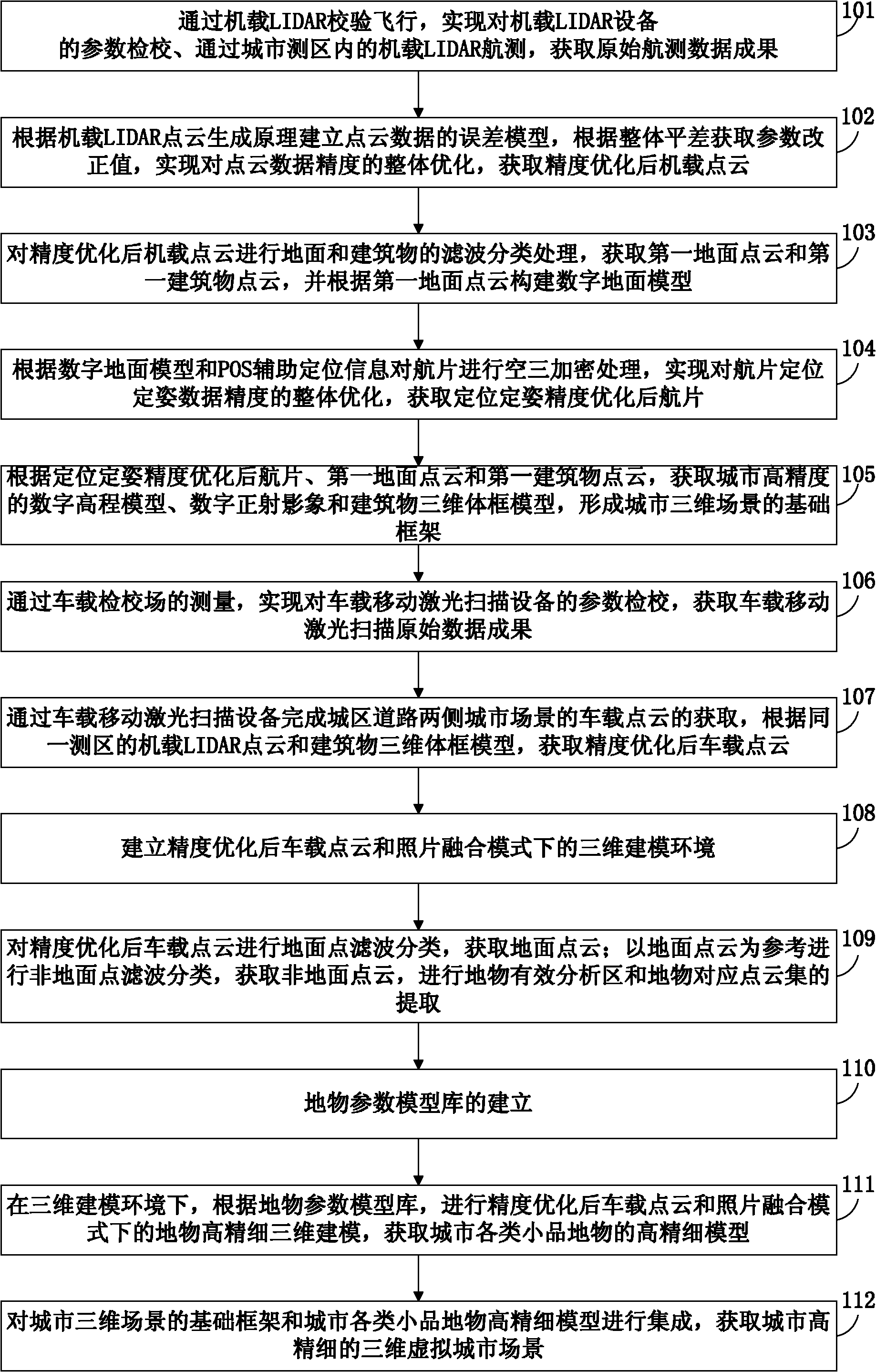
[0045] In order to improve development efficiency, reduce development cost, shorten development cycle and improve modeling precision, the embodiment of the present invention provides a high-precision three-dimensional modeling method for cities, see figure 1 , see the description below:
[0046] 101: Through the airborne LIDAR (Light Detection And Ranging, laser radar) verification flight, realize the parameter verification of the airborne LIDAR equipment, and obtain the original aerial survey data results through the airborne LIDAR aerial survey in the urban survey area;
[0047] Among them, the main components of airborne LIDAR are laser sensors, digital cameras and POS positioning and attitude determination systems. The laser sensor needs to c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More