

Roadside parking space detection device based on computer vision
A computer vision, roadside parking technology, applied in computer parts, calculations, indicating the direction of various open spaces in the parking lot, etc., can solve the problems of high investment and maintenance costs, large limitations, and low environmental adaptability, and achieves many The effect of intelligent traffic management function, wide detection range and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
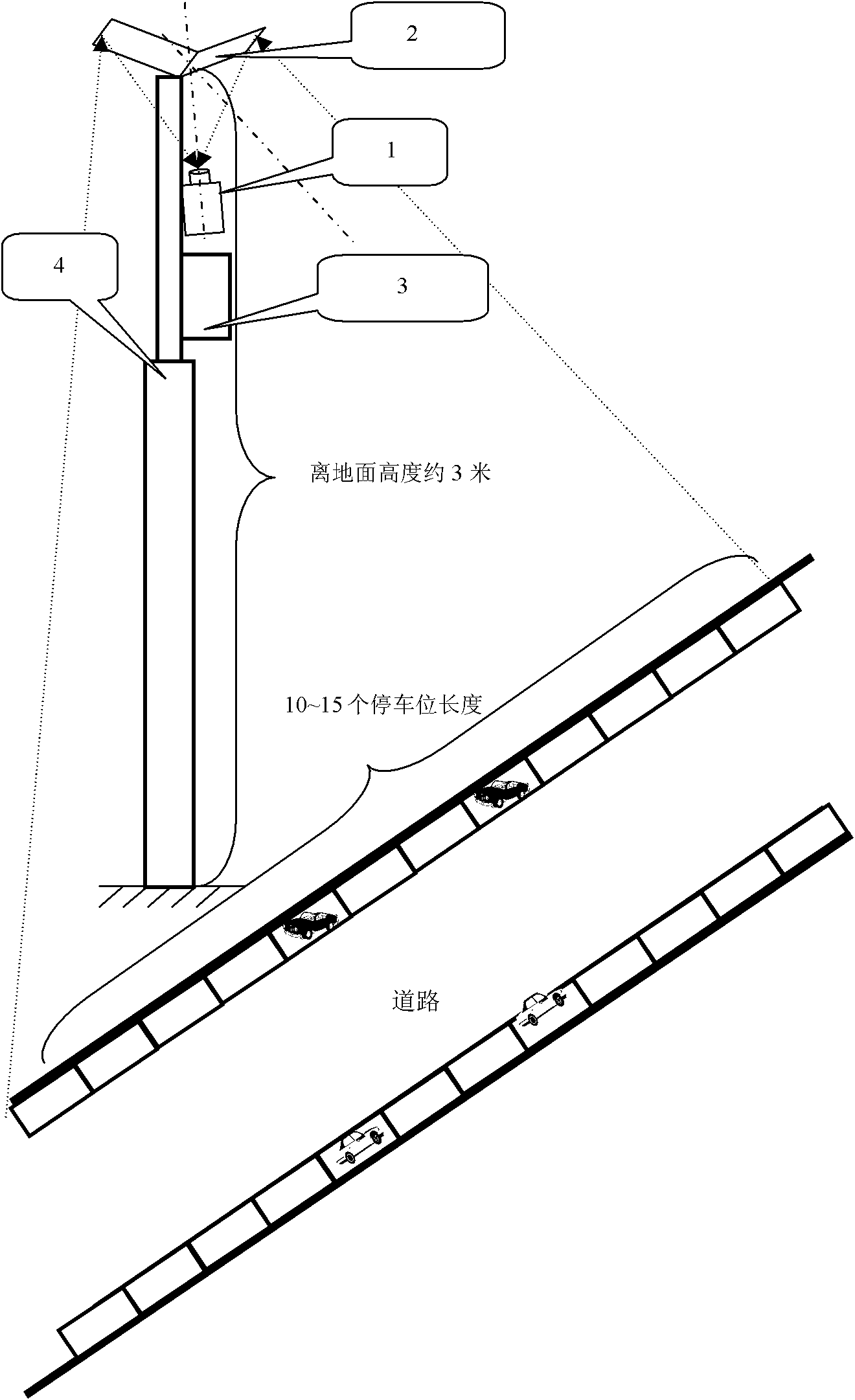
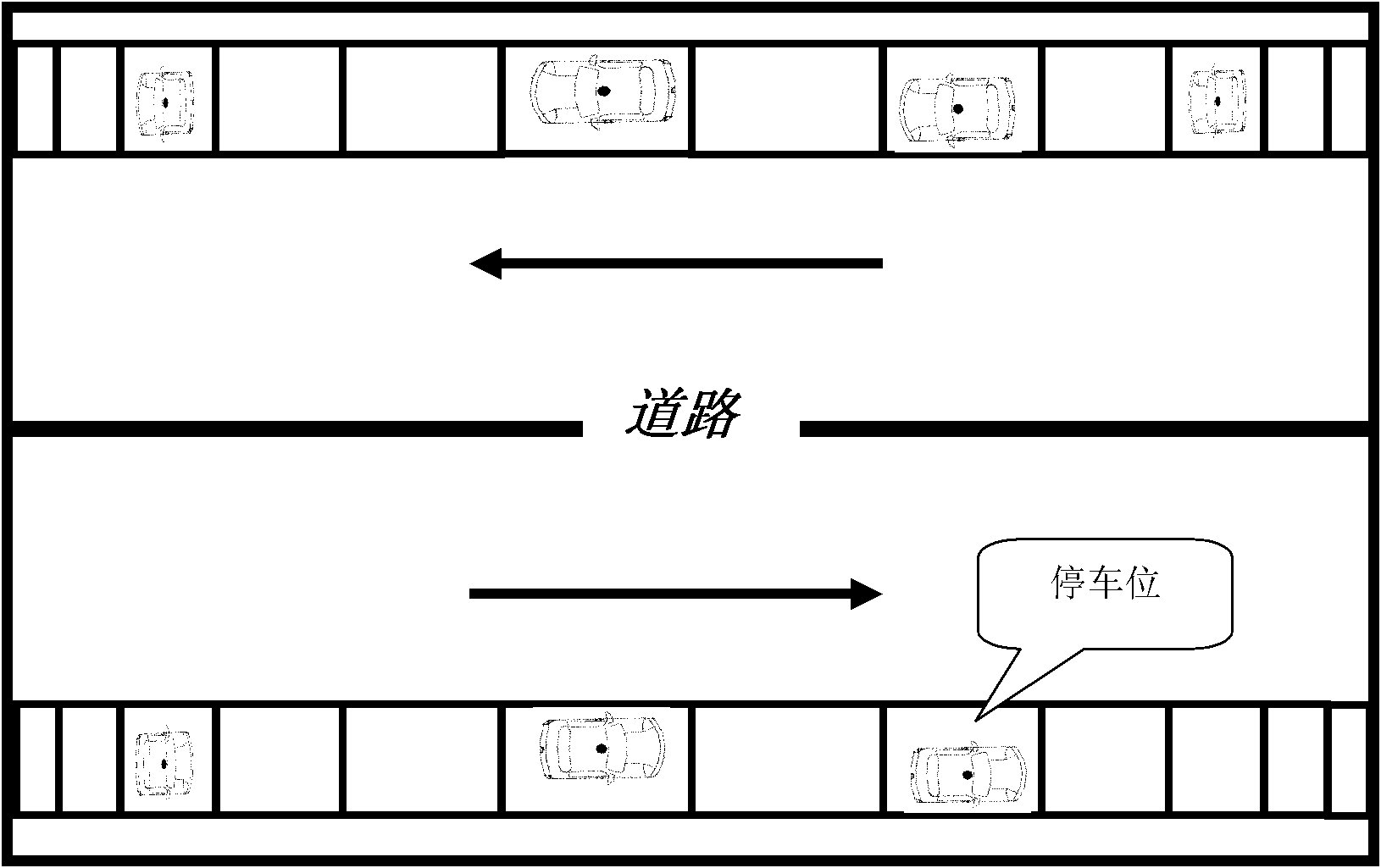
[0064] refer to Figure 1~5 , Figure 7-12 , a roadside parking space detection device based on computer vision, including a panoramic vision sensor installed on the side of the road with parking spaces, a micro-processing for analyzing the state of the parking space according to the video data of the parking space captured by the panoramic vision sensor Device 3, described panoramic vision sensor is connected with described microprocessor 3 through video interface, and described panoramic vision sensor and described microprocessor 3 are fixed on the pole 4 of road curb, as figure 1 As shown; the field of view of the panoramic vision sensor is 10 to 15 parking spaces along the road direction, basically consistent with the width of the road in terms of width, and the microprocessor includes embedded system hardware and embedded System software, described embedded system hardware comprises: CPU, video interface, storage unit, input unit, image storage unit, RAM, ROM, display un...
Embodiment 2
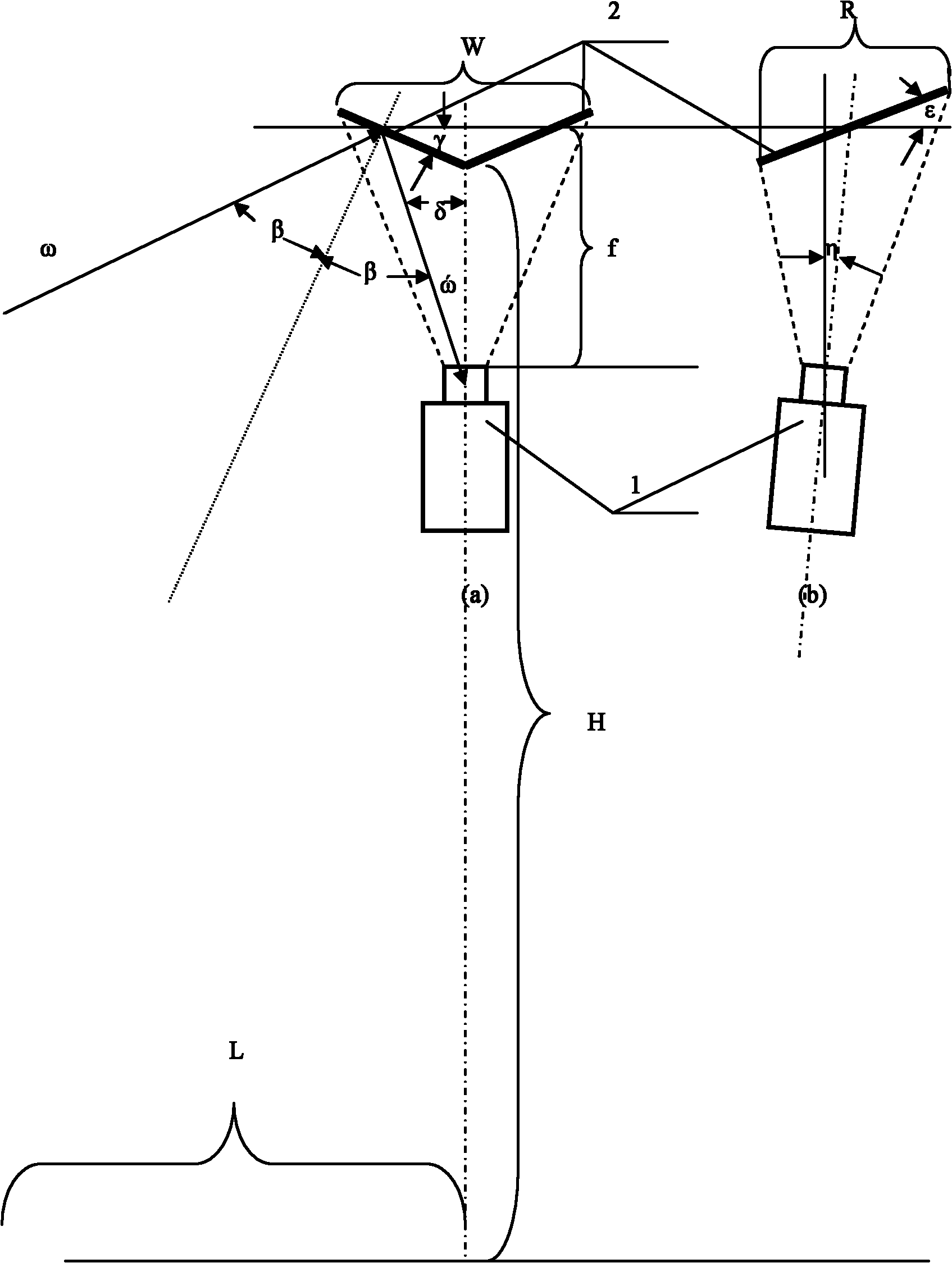
[0093] refer to Figure 1~4 , Figure 6-12 , in this embodiment, the adoption of the panoramic vision sensor Image 6 The arc mirror shown in place of figure 2 The two plane mirrors shown; given that the distance from camera 1 to the arc mirror is f, the field of view of camera 1 is W×R, the installation height of the panoramic vision sensor is H, and the visual length along the road is L, The radius of curvature of the arc mirror is W, the central angle of the arc is 60°, the arc length of the arc mirror is π×W / 3, the width of the arc mirror is slightly larger than R / cos(ε-η), ε is a circle The angle between the arc mirror surface and the horizontal plane on the side view, η is the angle between the camera and the pole.
[0094] Other schemes of this embodiment are all the same as in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More