Three-dimensional force sensor for minimally invasive surgery robot
A surgical robot and minimally invasive surgery technology, applied in the field of minimally invasive surgical robots, can solve problems such as the lack of force sense presence, and achieve the effect of simple structure and high sensitivity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
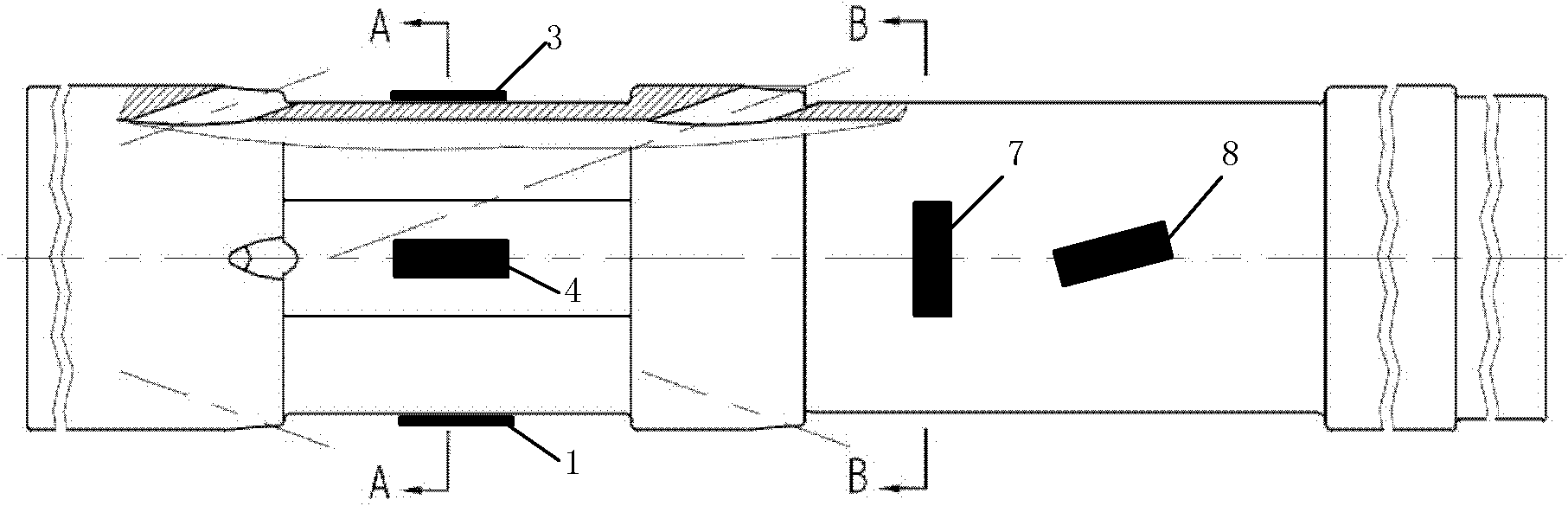
[0016] The present invention intends to measure the force on the tool at the end of the manipulator in the directions of the three translation degrees of freedom. At the beginning of the operation, the manipulator is inserted into the patient's abdominal cavity through the sheath tube fixed on the abdominal wall. In order to measure the contact force between the tool at the end of the manipulator and the patient's visceral tissue, the force sensor array is arranged on the surface of the hollow metal rod near the opening and closing tool ( The purpose is to avoid the influence of friction between the manipulator and the sheath on the sensor). Considering that the input power line and output signal line of the sensor must pass through the hollow metal round rod, some cutting processing is performed on the hollow metal round rod to meet the needs of arranging the sensor array and lead wires.
[0017] 1. The three-dimensional force sensor used in the minimally invasive surgical ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com