

A real-time control system and method for a humanoid robot
A real-time control system and humanoid robot technology, applied in the field of robotics, can solve problems such as inability to meet data traffic, and achieve the effects of ensuring real-time performance and reliability, expanding system bandwidth, and improving accuracy and smoothness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
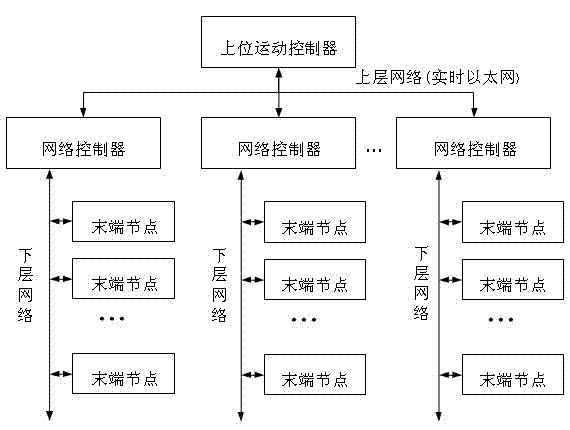
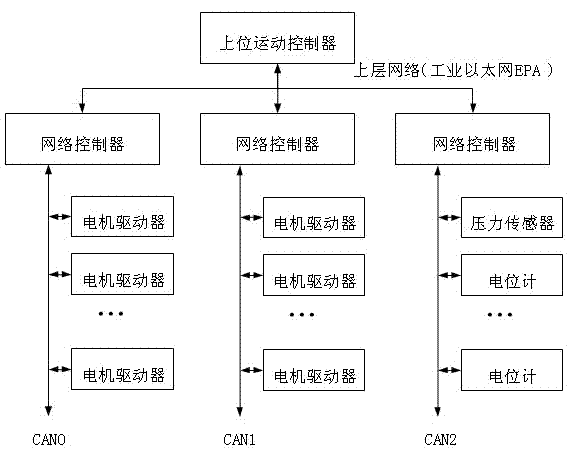
[0022] The real-time control system of the humanoid robot of the present invention includes an upper motion controller, several network controllers and several end nodes. Adopting a two-layer network structure, several network controllers are respectively connected to the upper motion controller through real-time Ethernet to form an upper network for communication. Each network controller is respectively connected with several end nodes; it forms multiple lower-level networks, and communicates with the communication method adopted by the end nodes.
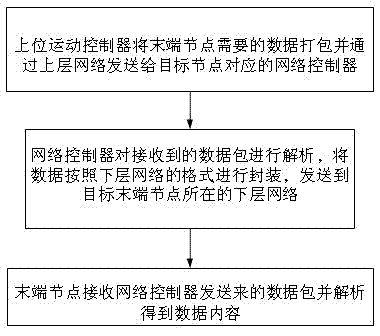
[0023] The upper motion controller is responsible for giving control signals and data, sending them to the network controller, and receiving data information from the network controller. The upper motion controller can be implemented by a PC, DSP or embedded system based on the x86 architecture, but it is not limited to this.
[0024] The network controller is responsible for receiving control commands and data from the upper-level mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More