Miniature robot facing tiny pipes of inner cavity of human body and motion method of miniature robot
A micro-robot and robotic technology, applied in the direction of surgery, can solve the problems of easy damage to the lumen wall, large liquid resistance, and difficult to operate, and achieve the effects of improving the efficiency of inspection and diagnosis and treatment, reducing the rotation speed, and having a simple structure.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The specific embodiments of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
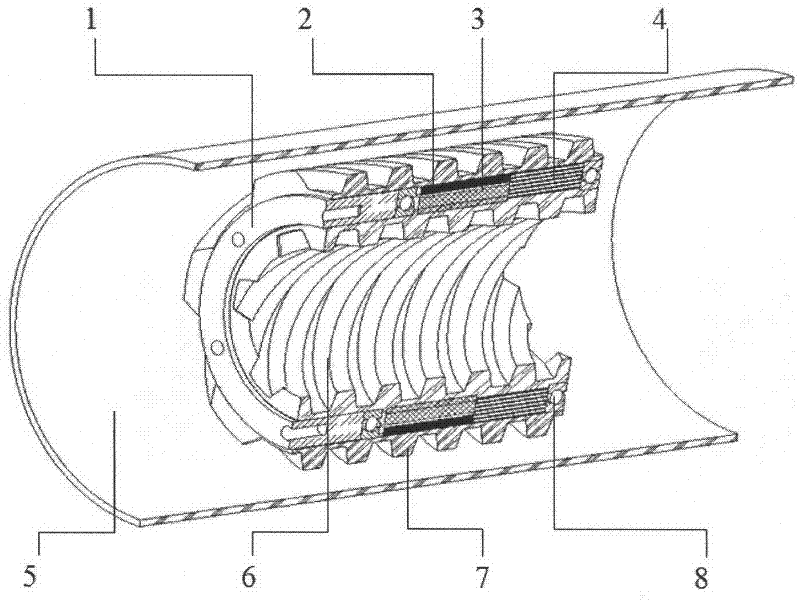
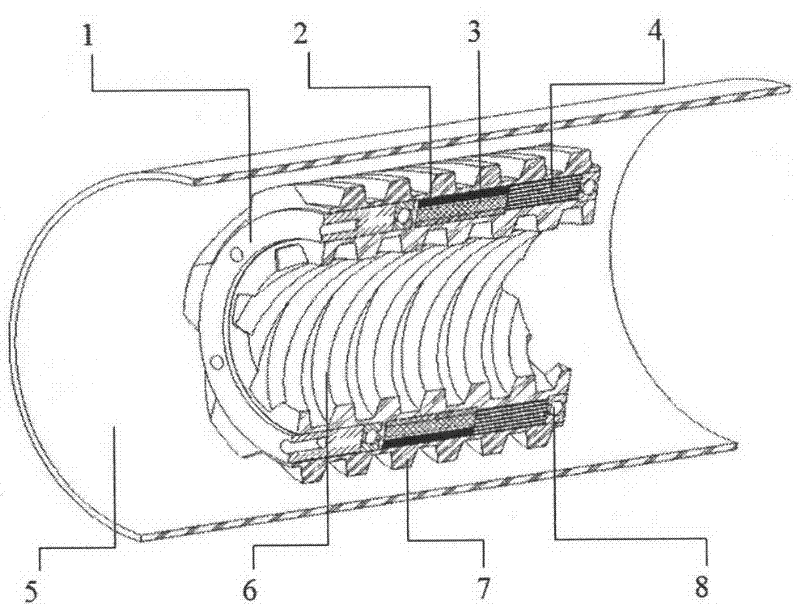
[0029] Such as figure 1 As shown, in one embodiment, the micro-robot facing the tiny pipeline of the human body cavity includes: the inner helical shaft 6 of the body, which is hollow and has a left helical groove on its inner surface; affixed The coil 3 on the helical shaft 6 in the body; the outer helical casing 7 of the body, the outer surface of the outer helical casing 7 of the body has a right helical groove; the permanent magnet 2 fixedly connected to the outer helical casing 7 of the body; A battery 4; and a wireless communication module and a control module 1 that communicate with the micro-battery 4 to wirelessly control the action of the robot outside the body. The permanent magnet 2 and the coil 3 form a micro-motor, which is supported by a rolling bearing 8 between the two. In addition, the robot can ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com