

Routing inspection system based on intelligent robot of transformer station and method for monitoring operation of transformer station
An intelligent robot and intelligent inspection technology, applied in the direction of electrical components, circuit devices, etc., can solve the problems of no video monitoring method for accident handling and maintenance operations, no monitoring method, and complex system, so as to reduce the time of transition. , the effect of small investment and simple system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
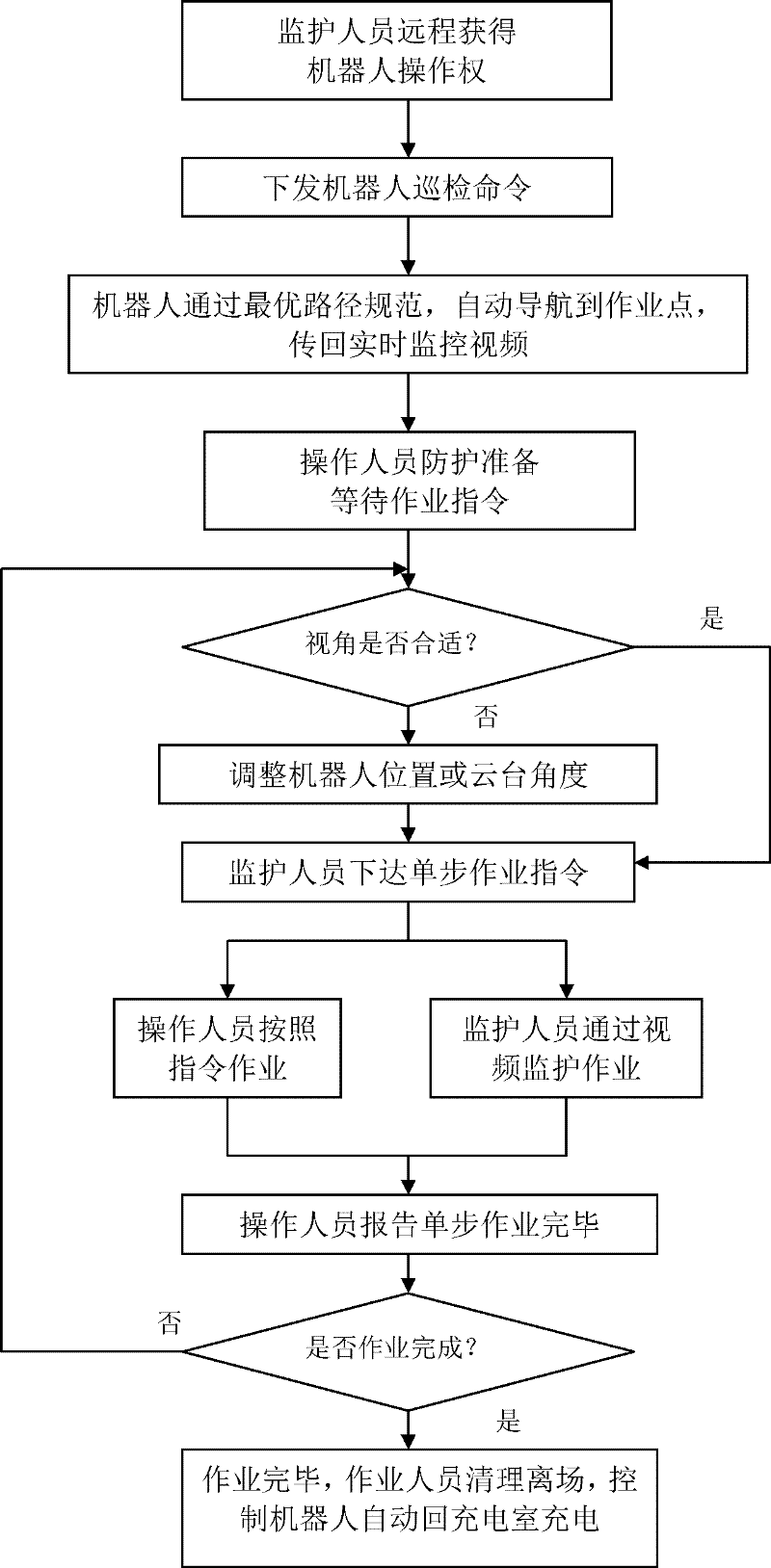
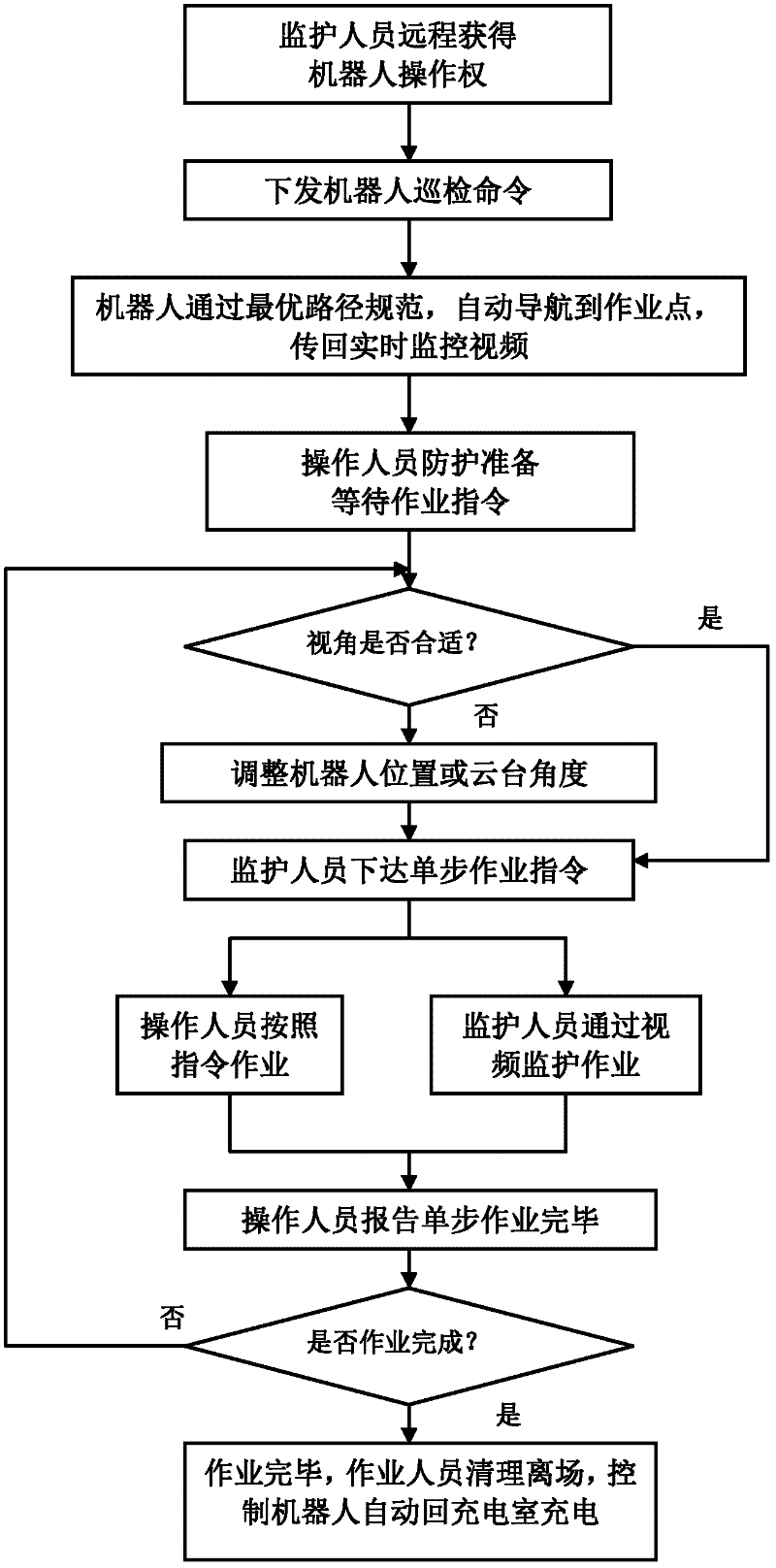
[0045] In order to further reveal the technical solution of the present invention, the embodiment of the present invention will be described in conjunction with a specific switching operation.
[0046] Assuming that the knife switch of Jihe Line II is located at RFID point 1, and the knife switch detection pan / tilt prefabricated position is No. 16, the sequence control operation steps of switching operation are as follows:
[0047] (1) Close the No. 1 knife gate of Jihe Line II
[0048] (2) Check that the knife switch of Jihe Line II is closed
[0049] (3) Operation ends
[0050] The concrete way that the present invention realizes is as follows:
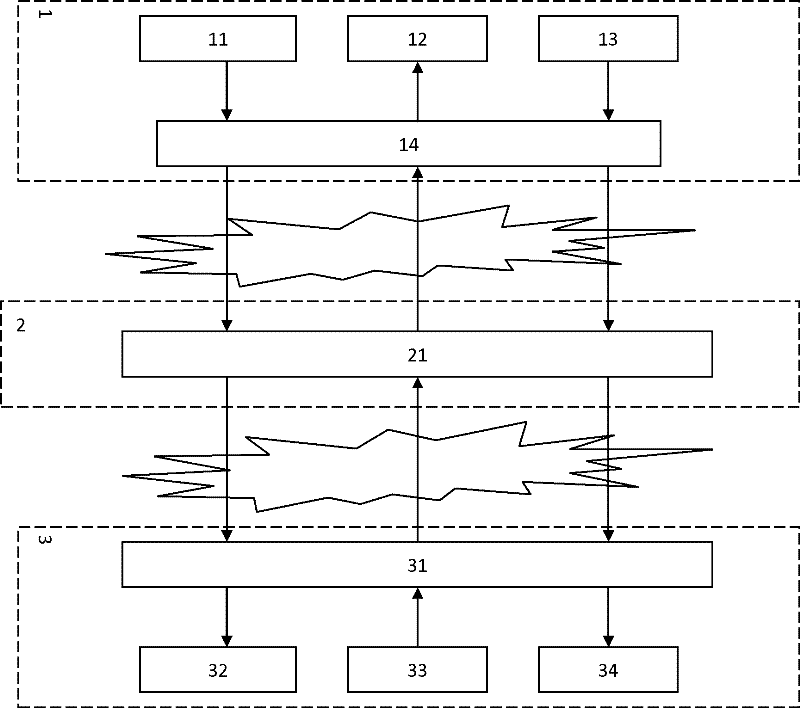
[0051] 1. The guardian is located in the remote centralized monitoring center, operates the remote centralized monitoring system 3 to establish a communication connection with the local background monitoring and analysis system 2 of the substation, and takes over the control of the intelligent inspection robot 1;
[0052] 2. Accord...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More