

Image navigation-based parallel robot-assisted artificial cervical intervertebral disc replacement surgery positioning method
A technology of robot-assisted and positioning method, which is applied in the field of surgery with parallel robots, and can solve the problem of doctors being exposed to more radiation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
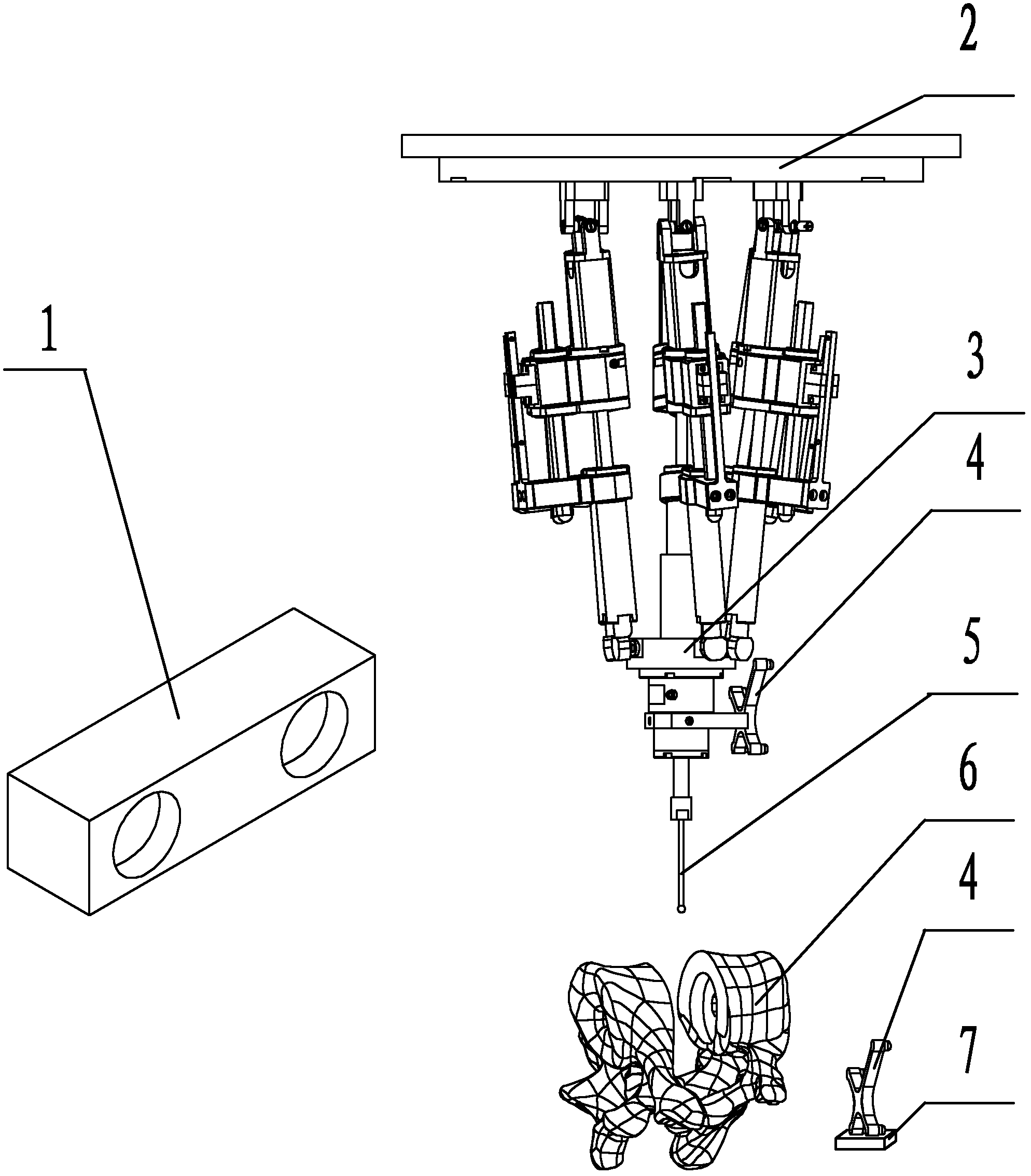
[0029] Specific implementation mode one: as Figure 1~5 As shown, the positioning method for parallel robot-assisted artificial cervical disc replacement surgery based on image navigation described in this embodiment is realized based on an optical positioning system, a parallel robot, a parallel robot grinder 5 and a computer, and the optical positioning system includes Two reflectors 4, an optical locator 1 and a probe, the parallel robot and the optical locator are connected to the computer, and a reflector 4 is installed on the drill shank of the parallel robot grinding drill 5; the specific method of the described method The process is:
[0030]Step A, utilize the three-dimensional reconstruction software to complete the three-dimensional reconstruction of the cervical vertebra CT image at the patient's lesion by the computer, obtain the three-dimensional model of the cervical vertebra of the disease, and use the solidworks software to grind and drill (parallel robot grin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More