

Method for recognizing touch points by using acoustic wave touch screen
A touch screen and touch point technology, applied in the input/output process of data processing, instruments, electrical digital data processing, etc., can solve the problems of circuit complexity, cost, signal frequency, occurrence time, strong and weak uncertainty, processor Deal with problems such as higher requirements for capacity, achieve the effect of reducing product cost, improving anti-interference ability, and convenient processing and debugging
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
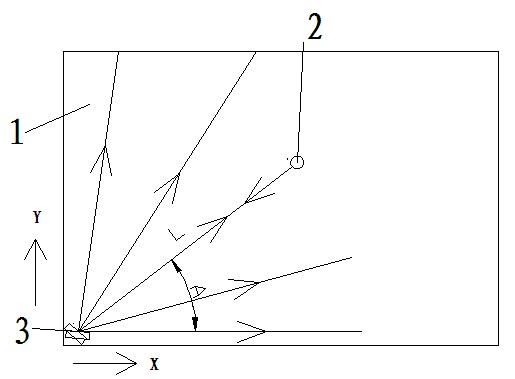
[0047] The acoustic pulse signal emitted by the transducer reaches the touch body after a time t, and after being reflected by the touch body, it is reflected back to the transducer that is already in the receiving state after the same time t. For the touch screen body, due to the surface acoustic wave pulse signal The transmission speed V is constant, so the distance L from the touch body to the transducer is: L=V t.
[0048] For a single transducer, only the distance between the transducer and the touch body can be determined, but the plane position of the touch body cannot be determined. Therefore, the orientation of the touch body needs to be determined.
[0049] For transducers with strong directivity and small emission angle, it is necessary to scan the touch area of the screen body by mechanical or electronic means. When scanning to the specified angle A, the emission signal is reflected back to the transducer due to the reflection of the touch body. , the distance L ...
Embodiment 2
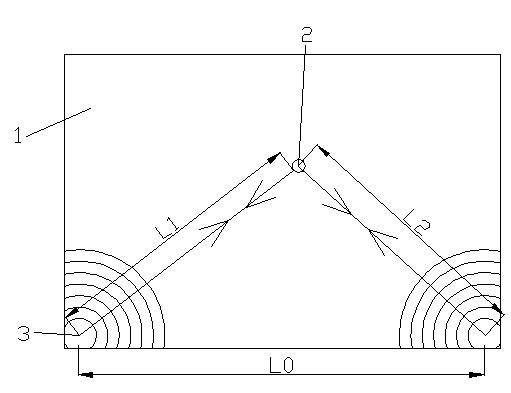
[0057] A transducer with a large emission angle is used to emit to the touch area at the same time. The touch body can reflect the sound wave propagating along the surface in any direction of the screen. It does not need to scan, and the distance between the touch body and the transducer can be determined, but The position of the touch body cannot be determined. At least two transducers must be used, which are arranged on the sides or / and corners outside the touch area. The geometric relationship between the body and the transducer determines the touch position of the touch body. This method has a large emission angle, relatively dispersed energy, does not require scanning and emission of signals, and has a simple and reliable circuit or structure.
[0058] Without considering the size of the touch body, L0 is the known distance during design, and L1 and L2 are the distances actually detected. According to the geometric relationship, the touch position X and Y are determined b...
example 3
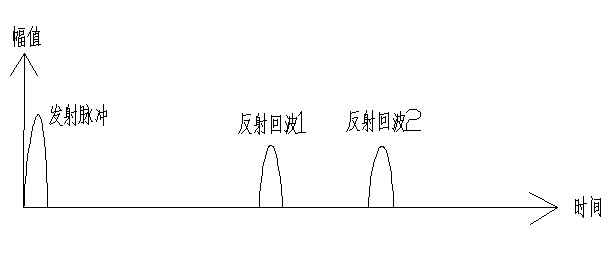
[0063] When there is more than one touch body, different touch bodies will generate more than one echo, such as image 3 In order to identify the echoes of the same touch object, multiple transducers can be used, such as Figure 4 , increase the redundancy of detection, or identify multiple touch objects at the same time.
[0064] When designing, the distances L0, Lx, and Lxy between the transducers are fixed and known, and the distances L1, L2, L3, L1a, L2a, and L3a from the touch body to the transducer are detected by the controller. The position coordinates can be obtained by calculating the geometric position relationship between the touch body and the transducer. In order to simplify the amount of calculation, the coordinate relationship data can also be tabulated and obtained by looking up the table.
[0065] As shown in the figure, the touch positions X and Y of the touch body 2 can be respectively calculated from three sets of data (L1, L2, L0), ( L2, L3, Ly), (L1, L...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More