Fully flexible six-degree-of-freedom fine operating platform
An operating platform and degree-of-freedom technology, used in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the destructive influence of operating objects and systems, complex structures, and limited precision of microscopic equipment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
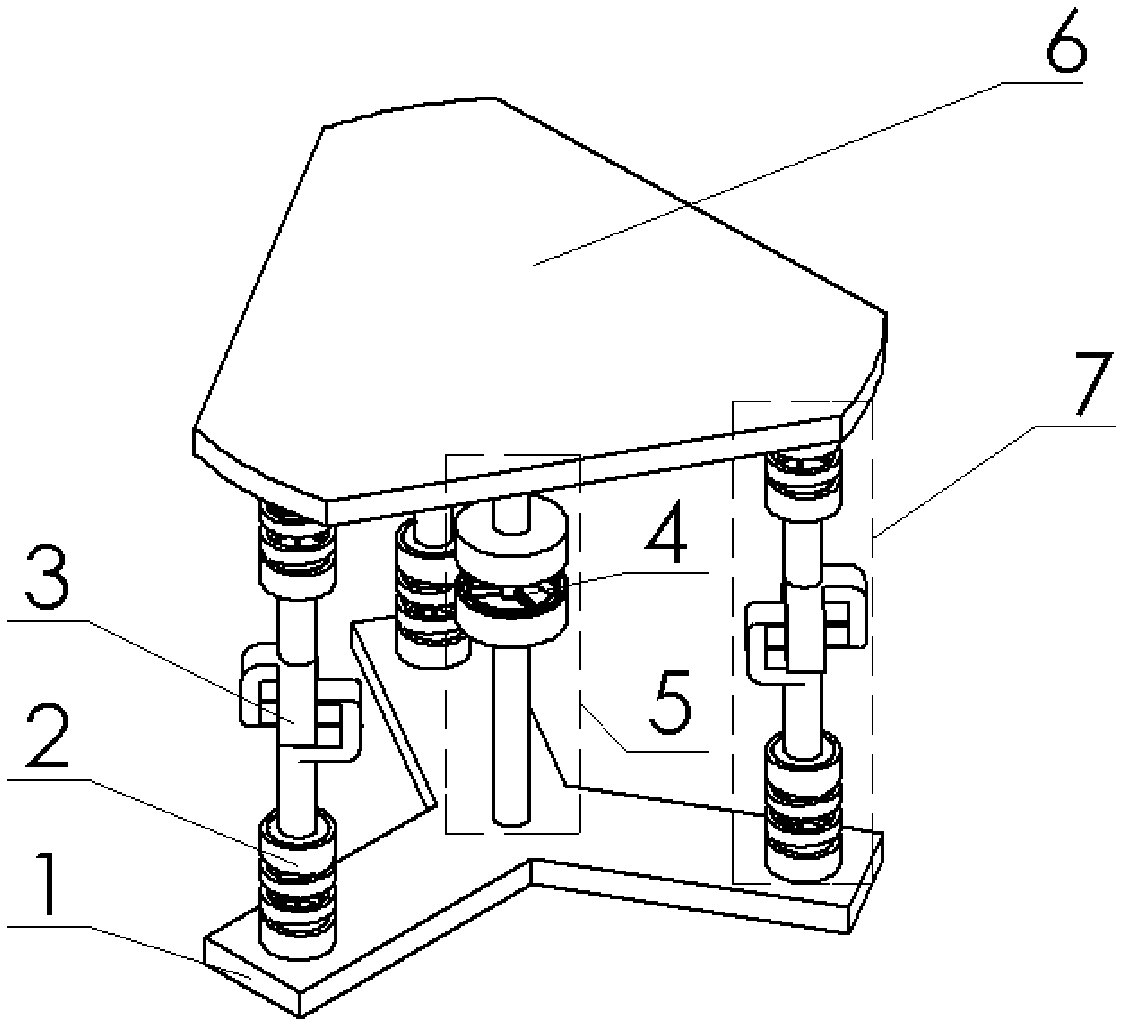
[0045] see figure 1 , the mobile platform is used to support the manipulated object for micro-manipulation, and the micro-manipulation robot hand operates on the manipulated object, such as optical fiber docking, micro-electro-mechanical system assembly, etc. The middle branch chain is connected with the fixed platform, and the three groups of the same side branch chains are composed of a flexible movable hinge in the middle and a flexible ball hinge at both ends connected by a taper thread pair, and the middle branch chain is composed of a four-degree-of-freedom flexible hinge in the middle and a flexible ball hinge at both ends. It consists of a cylinder with conical external threads at both ends, and is connected with the conical internal threads on the mobile platform and the fixed platform through the conical external threads at both ends.
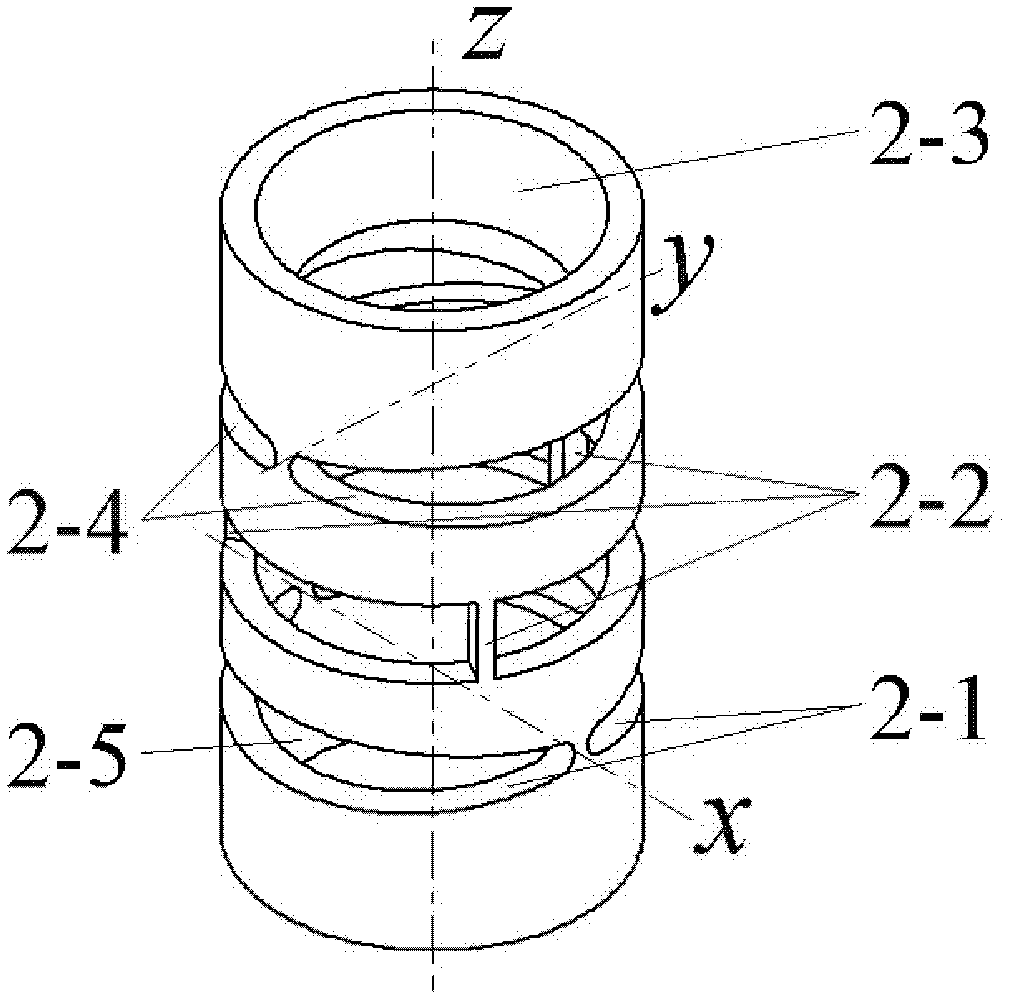
[0046] exist figure 2 Among them, 2-1 is the two shuttle-shaped channels of the flexible ball hinge along the x-axis direction (ac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com