

Realization method applied to unmanned vehicle control terminal
A technology of unmanned aerial vehicles and terminals, applied in the direction of three-dimensional position/channel control, etc., can solve the problems of inconvenient civil low-end operation applications and high cost, achieve convenient and intuitive control of auxiliary functions, reduce operating burden, and improve work efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
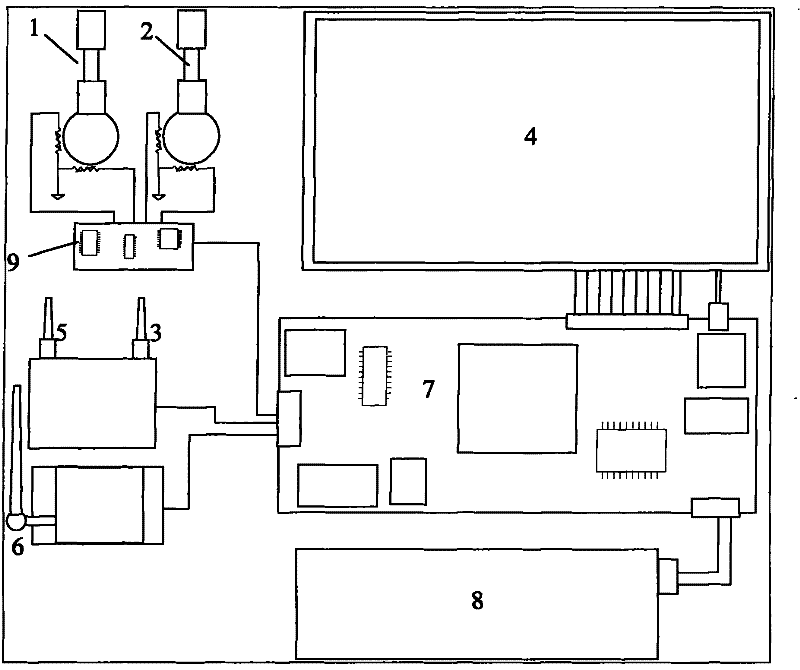
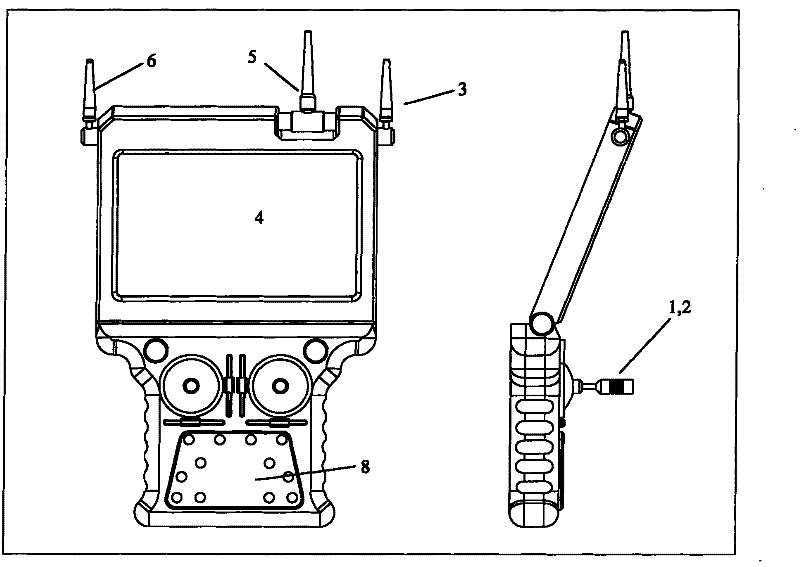
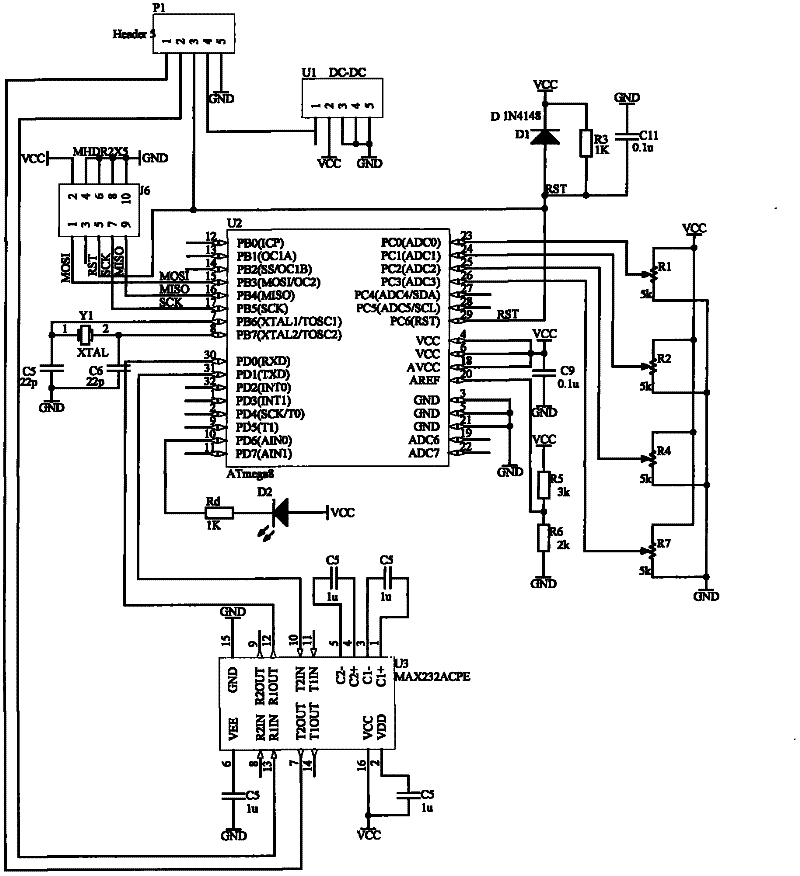
[0037] exist figure 1 Among them, the left and right joysticks 1, 2 are connected to the hand control panel 9. The control board 9 converts the potentiometer voltage signals output by the two joysticks into a digital signal to represent the angle of joystick offset, and then transmits it to the computer main board 7 through the data transmission port. As a preferred solution, the control board circuit includes an Atmega8 single-chip microcomputer, a reset circuit, a program download interface, and a 232 communication interface. The output voltage signals of the four potentiometers of the two joysticks are connected to the ADC0~ADC3 digital-to-analog conversion channels of the Atmega8 microcontroller, and the output voltages of the four joystick potentiometers are collected at a period of 20ms, and the collected control signals are collected through the 232 communication interface. The instruction is sent to the main board 7 of the tablet computer. The control command output ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More