

Rope-traction upper limb rehabilitation robot and control method thereof
A rehabilitation robot and rope traction technology, applied in the fields of sensors, medical science, fractures, etc., can solve problems such as poor adaptability, inconvenience for patients, immature technology, etc., and achieve the effect of simple structure, low production cost, and flexible control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
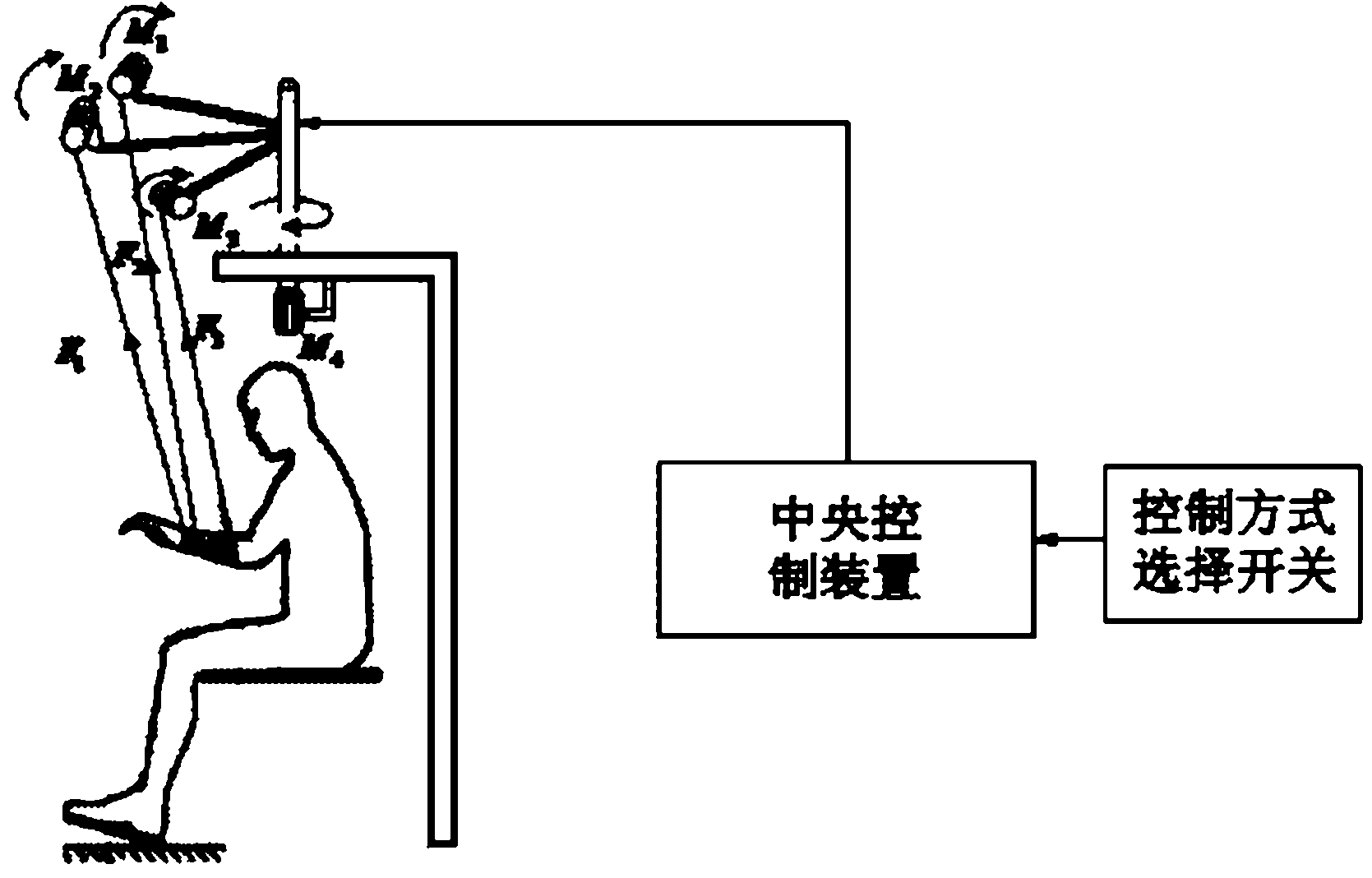
[0034] Such as figure 1 As shown, a rope traction upper limb rehabilitation robot provided in Embodiment 1 of the present invention is a bracket-type passive control mode structure, including a central control device, a control mode selection switch, a main bracket and an auxiliary bracket, and a servo motor M4 on the main bracket. Connect the sub-support, and control the horizontal rotation of the sub-support through the central control device. There are three cantilever beams on the sub-support, and three servo motors M1, M2, and M3 are respectively connected to the three cantilever beams to receive control signals from the central control device. The rope applies force F1, F2, F3 to pull the same supporting board to move in three-dimensional space. The patient'...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More