

Vehicle running state nonlinear robust estimation method based on sliding mode observer
A technology of vehicle running state and sliding mode observer, which is applied in the field of nonlinear robust estimation of vehicle running state based on sliding mode observer, can solve the problems of high precision, low cost, large measurement error, etc., and achieve strong anti-interference ability , high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
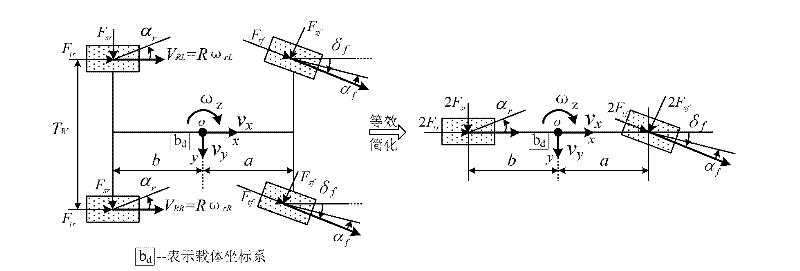
Method used
Image

Examples
Embodiment 1
[0086] At present, the problem of road traffic safety has become increasingly prominent and has become a global problem. In order to prevent the occurrence of road traffic accidents, automotive active safety technology has developed rapidly in recent years. Automobile active safety technology can prevent accidents before they happen and actively avoid accidents, which has become one of the most important development directions of modern automobiles. The current common active safety technologies mainly include anti-lock braking system (ABS), vehicle electronic stability program (ESP), traction control system (TCS), electronically controlled anti-skid system (ASR), four-wheel steering stability control system (4WS). )Wait. These systems usually involve the measurement or estimation of the speed of the car tires, the longitudinal forward speed of the car, the lateral speed, the yaw rate, and the side slip angle of the center of mass, etc. These operating state measurements can b...
Embodiment 2
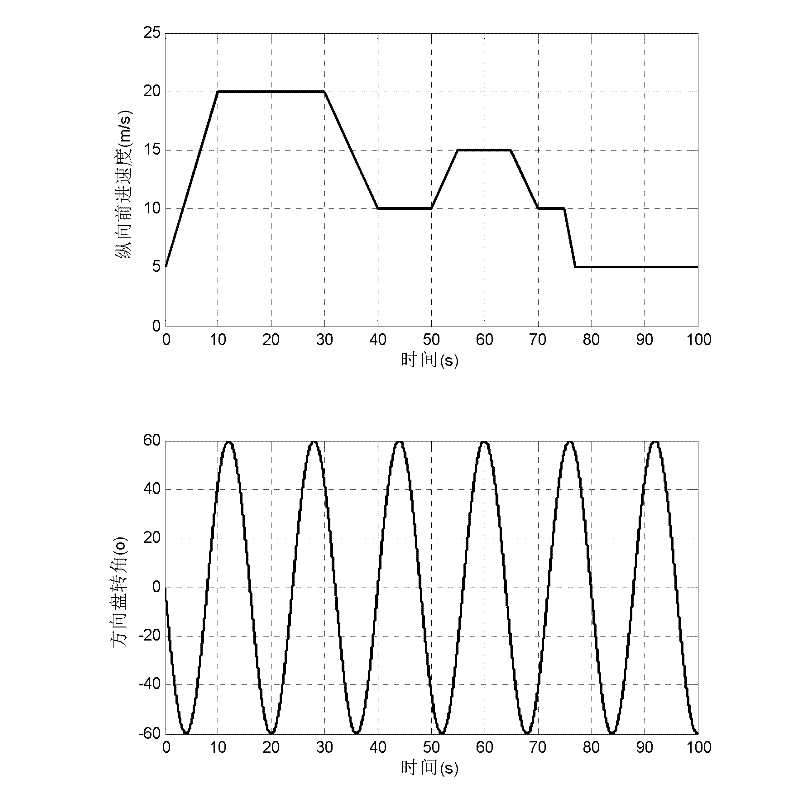
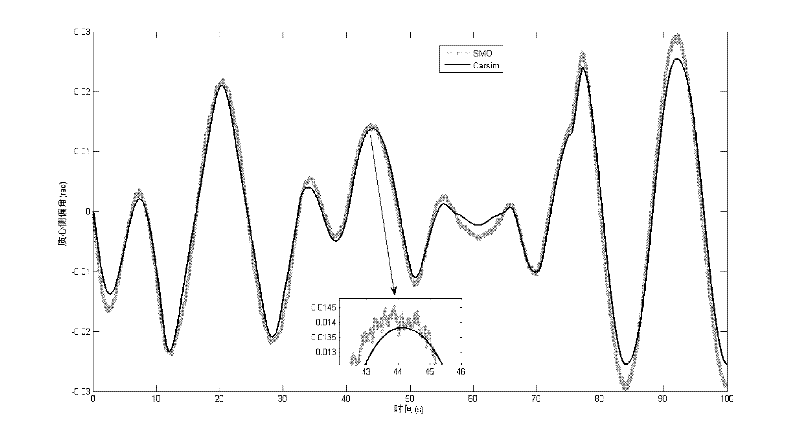
[0217] In order to test the actual effect of the non-linear robust estimation method of the vehicle operating state based on the sliding mode observer proposed by the present invention, a simulation verification experiment is carried out by using the professional vehicle dynamics simulation software CarSim.
[0218] CarSim is a simulation software specially designed for vehicle dynamics developed by MSC (Mechanical Simulation Corporation) in the United States. Commercially developed, it has become standard software in the automotive industry and enjoys a high reputation. The vehicle dynamics model in Carsim is realized through the high-fidelity modeling of the car body, suspension, steering, braking and other subsystems, as well as each tire. It has a high degree of freedom and can provide a very close The actual and accurate vehicle running status information, therefore, the vehicle running status information output by Carsim can be used as the reference output of the vehicle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More