

Rhomboid wheel-arranged cross-shaped axle 4WD (4 wheel drive) mechanism
A four-wheel drive, cross-bridge technology, applied in steering mechanisms, motor vehicles, control devices, etc., can solve problems such as increasing technical difficulties and inability to meet the requirements of precise handling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
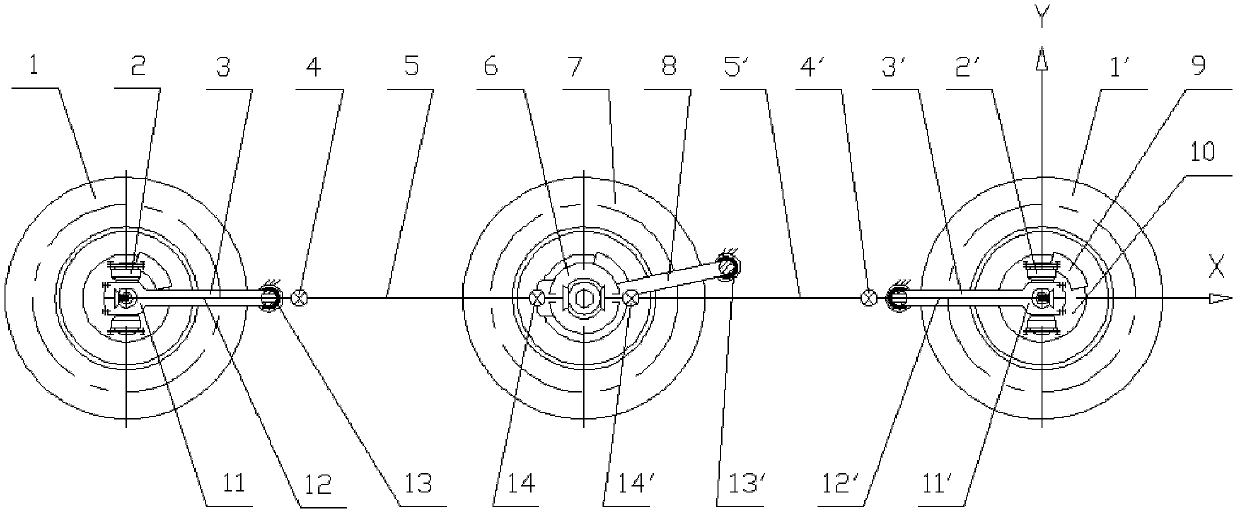
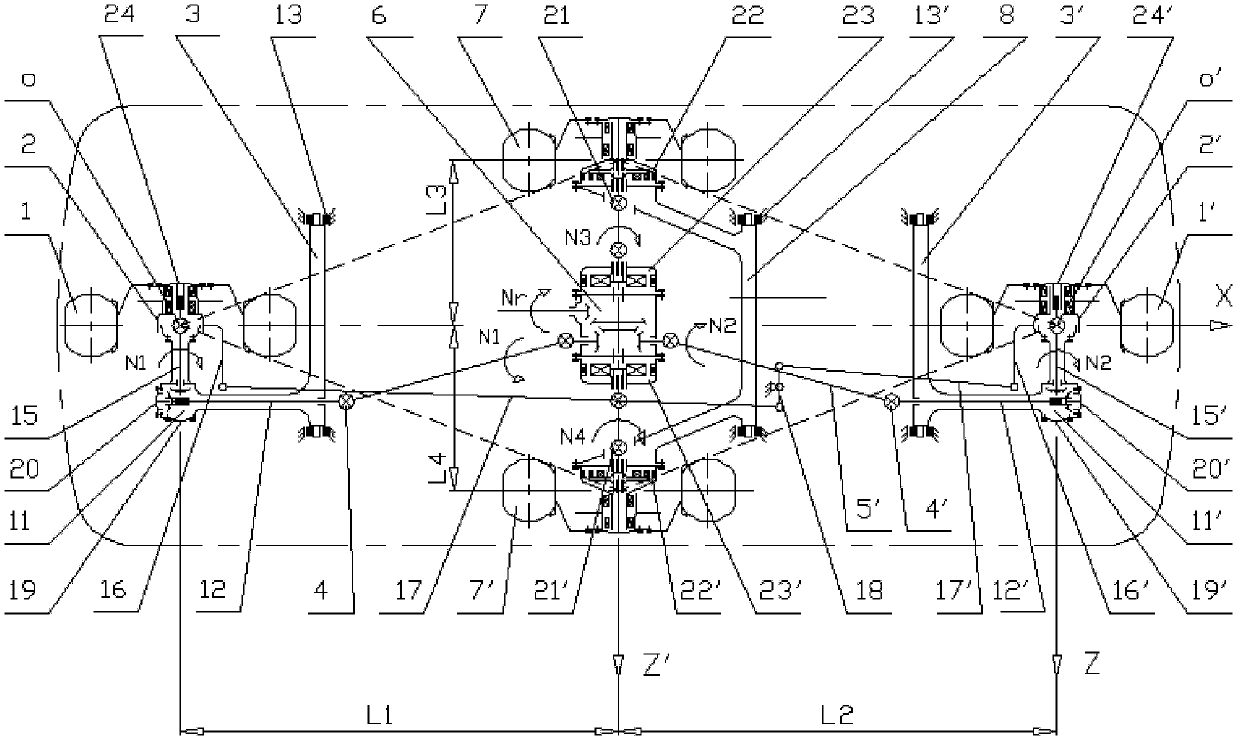
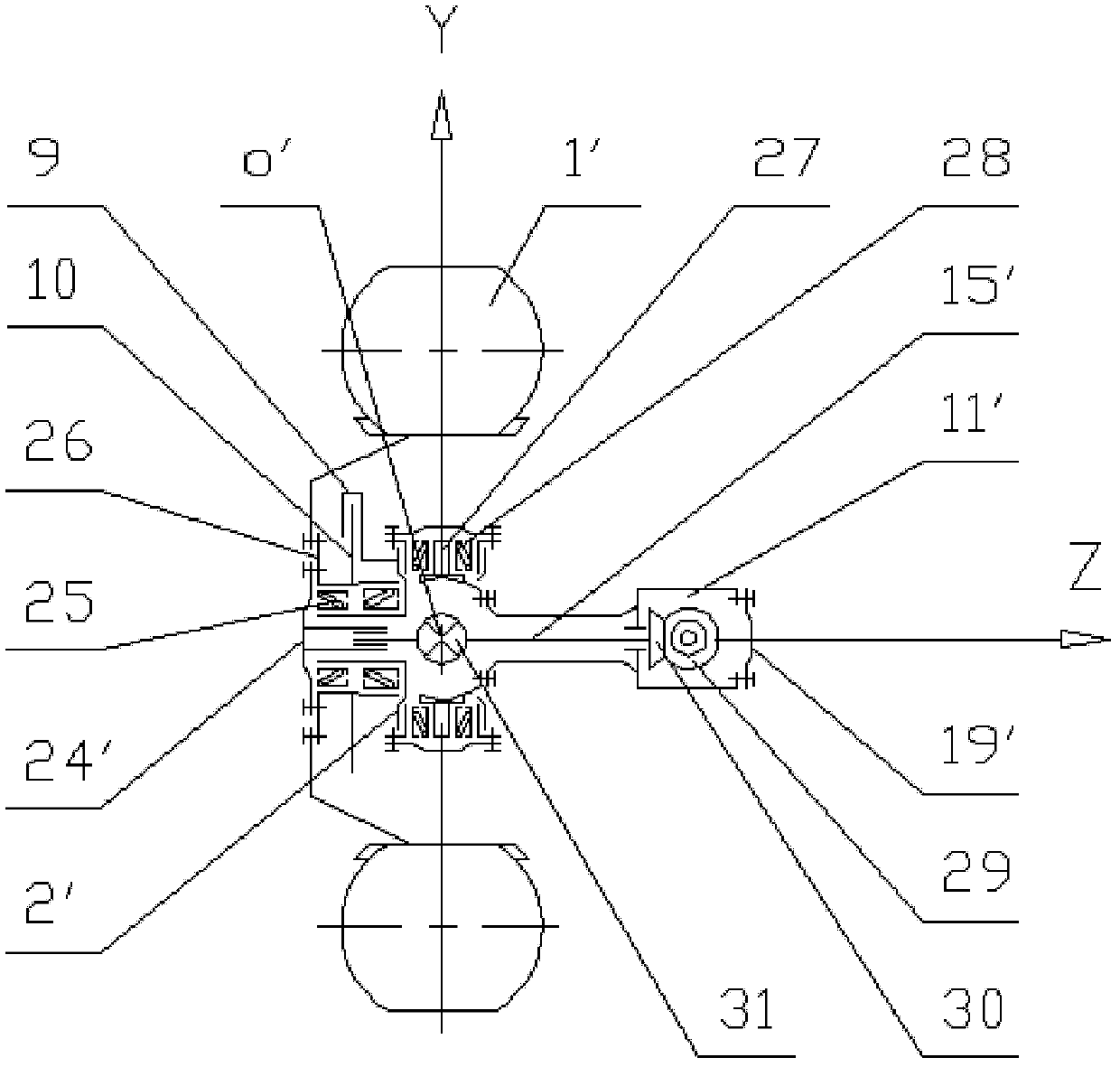
[0036] The present embodiment is a four-wheel drive mode in which the engine and the motor module are combined. The engine drives the left and right wheels 1, 1', and the motor drives the upper and lower wheels 7, 7'. figure 1 , 2 , 3, 4, 5 further explain the specific content and implementation process.
[0037] The four wheels 1, 1', 7, 7' are arranged on the 4 corners of the "◇" shape, wherein, the left wheel 1, the left steering kingpin assembly 2, the left Type cantilever 3, driver 6, right Type cantilever 3 ′, right steering kingpin assembly 2 ′, right wheel 1 ′ constitute the steering drive axle in the left and right direction, and the upper wheel 7, the power-on clutch 22, the upper motor 23, the middle cantilever 8, the lower motor 23 ′, the lower power Clutch 22 ′, lower wheel 7 ′ form the up and down direction drive axle, and the left and right direction steering drive axle and the up and down direction drive axle form a cross-type " ten " font structure drive a...
Embodiment approach 2
[0053] The present embodiment is the anti-skid driving mode of the left and right wheels 1, 1', which is a simplified form of Embodiment 1, or the anti-skid driving mode of the middle row of wheels. combined with figure 1 , 2 , 3, 4, and 6 illustrate the specific content and implementation process of this embodiment.
[0054] In the four-drive mode of the left, right, up, and down wheels 1, 1', 7, 7' in Embodiment 1, only two driving speeds N1, N2 are reserved, and two driving speeds N3, N4 are cancelled. Promptly remove the power and transmission parts of the upper and lower two wheels 7, 7 ', change the two wheels 7, 7 ' into passive wheels, and only utilize the rotating speed N1, N2 to drive the left and right two wheels 1, 1 '.
[0055] First remove the upper and lower motors 23, 23' from the driver 6 via screw I34 and screw II34', then remove the upper and lower spline half shafts 43, 43', universal joint V21 and universal joint VI21', and upper and lower electric clutc...
Embodiment approach 3
[0058] This embodiment is the electric drive mode of the upper and lower wheels 7, 7', which is another simplified form of Embodiment 1, or the electric drive mode of the middle train wheel. combined with figure 1 , 2 , 3, 4, and 7 illustrate the specific content and implementation process of this embodiment.
[0059] In the four-drive mode of the left, right, up, and down wheels 1, 1', 7, 7' of Embodiment 1, only two driving speeds N3, N4 are reserved, and two driving speeds N1, N2 are canceled. Promptly remove the power and transmission parts of the left and right two wheels 1, 1 ', change the two wheels 1, 1 ' into passive wheels, and only utilize the rotating speed N3, N4 to drive the upper and lower two wheels 7, 7 '.
[0060] First remove the driver 6 via screw I34 and screw II34' respectively, then use screw I34 to directly connect the upper and lower motors 23, 23' together and install them on the car body or vehicle frame through the corresponding rubber / metal suppo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More