

Calibrating algorithm for positioning system of outdoor mobile robot
A mobile robot and positioning system technology, applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., can solve the problems of reduced effectiveness of positioning data, and achieve the effects of convenient operation, simple calculation, and strong applicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be further described below in conjunction with the accompanying drawings.
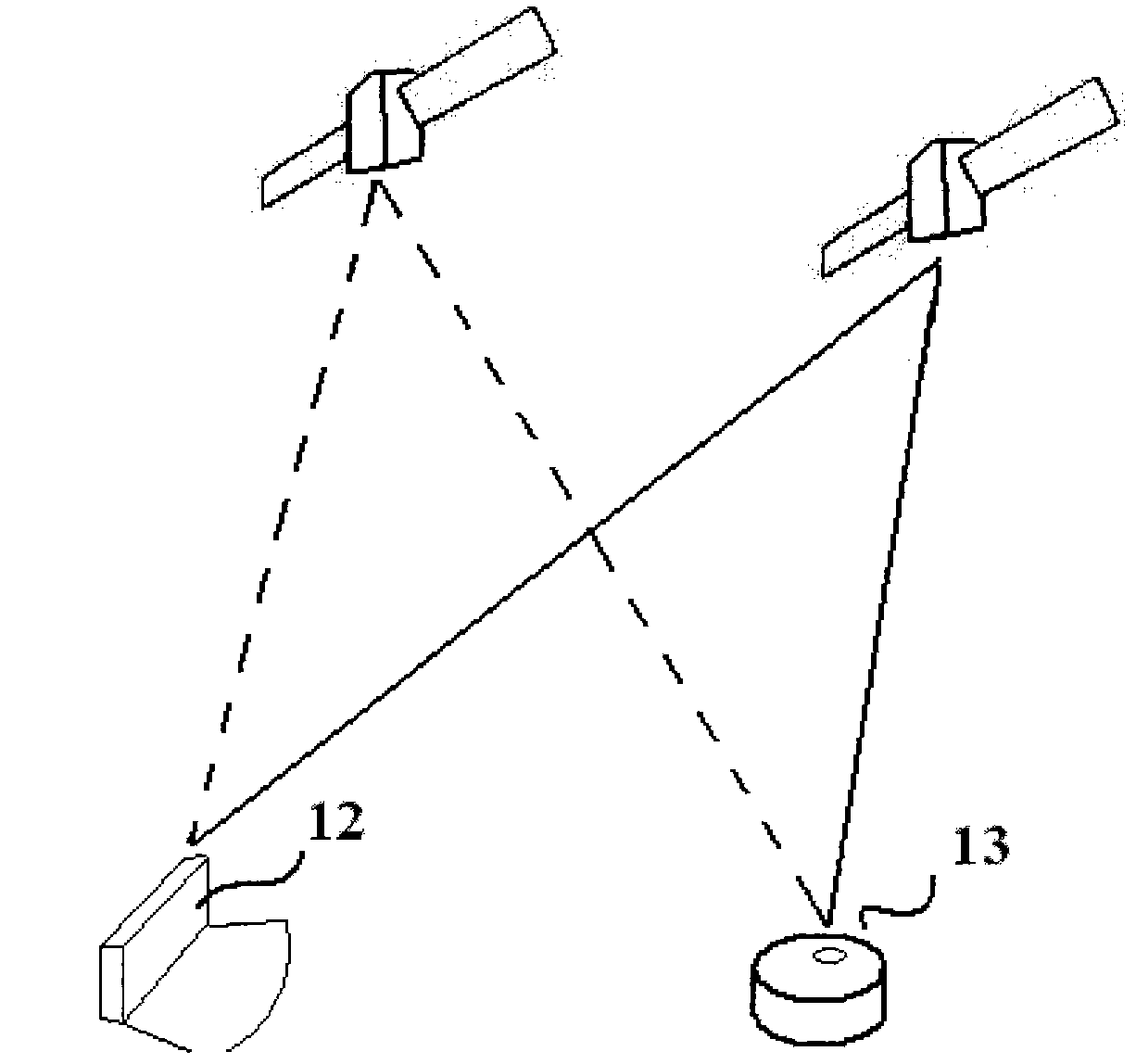
[0016] refer to Figure 1-4 , the calibration algorithm of the outdoor mobile robot positioning system, the positioning system includes a base station 12 that provides a charging interface for the mobile robot 13, and the mobile robot 13 moves and works in a wide range, so a rechargeable battery is used as a power source, and The base station 12 provides a charging connector with a suitable voltage. When the rechargeable battery is about to run out, the mobile robot 13 searches for the base station 12 for charging.
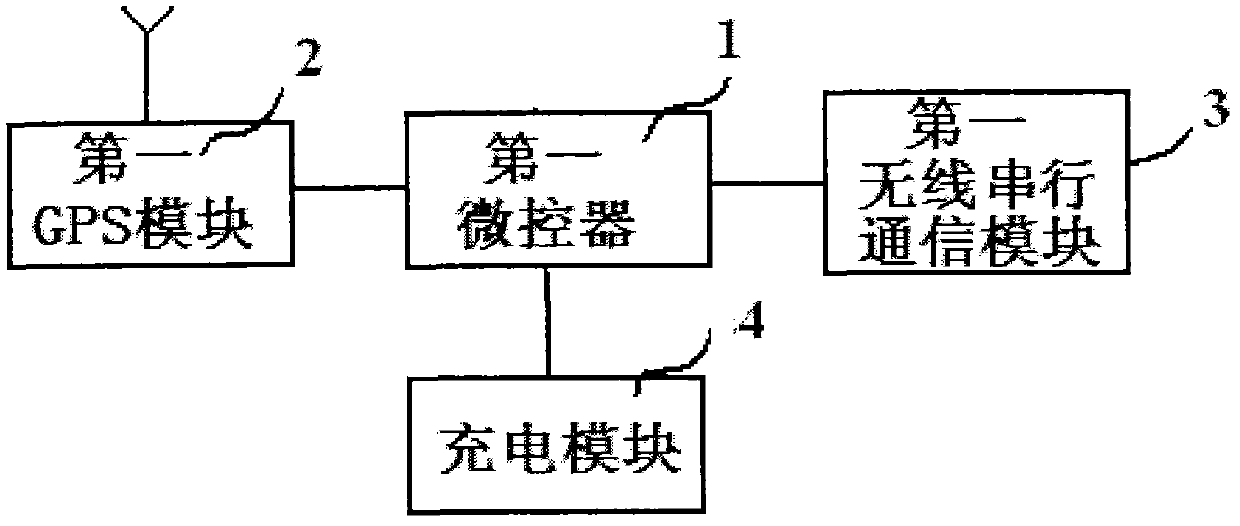
[0017] The base station 12 is provided with a base station electronic control device, and the base station electronic control device includes a first micro-controller 1 for centralized processing, a charging module 4 for controlling the charging process, and a charging module 4 connected to the first micro-controller 1 The first GPS module 2 and the first...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More