

Cascading gain self-scheduling PID (Proportion Integration Differentiation) controller
A self-scheduling and controller technology, applied in electric controllers, controllers with specific characteristics, etc., to achieve the effect of shortening transition time, improving robustness, and reducing dynamic and static deviations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
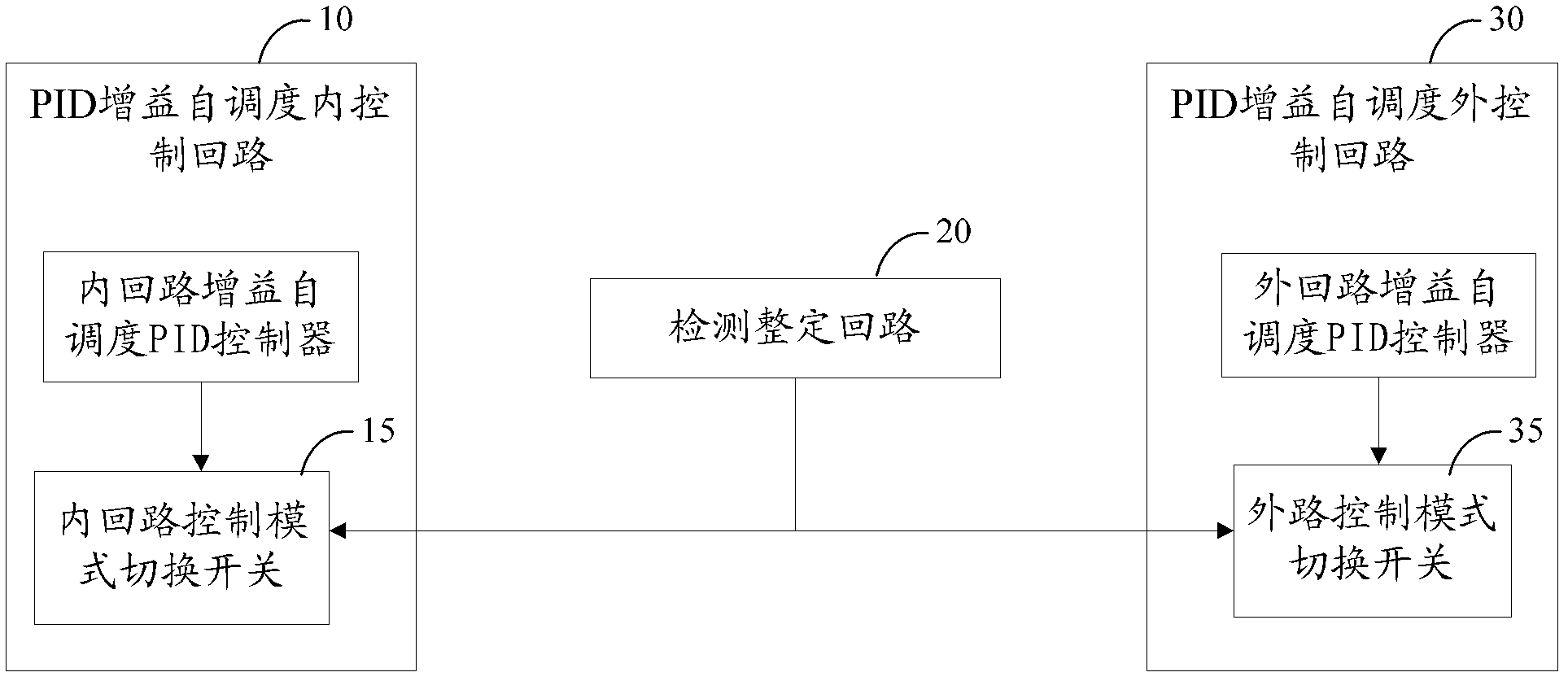
[0013] see figure 1 , figure 1 It is a simplified structural diagram of the cascade gain self-scheduling PID controller of the present invention.
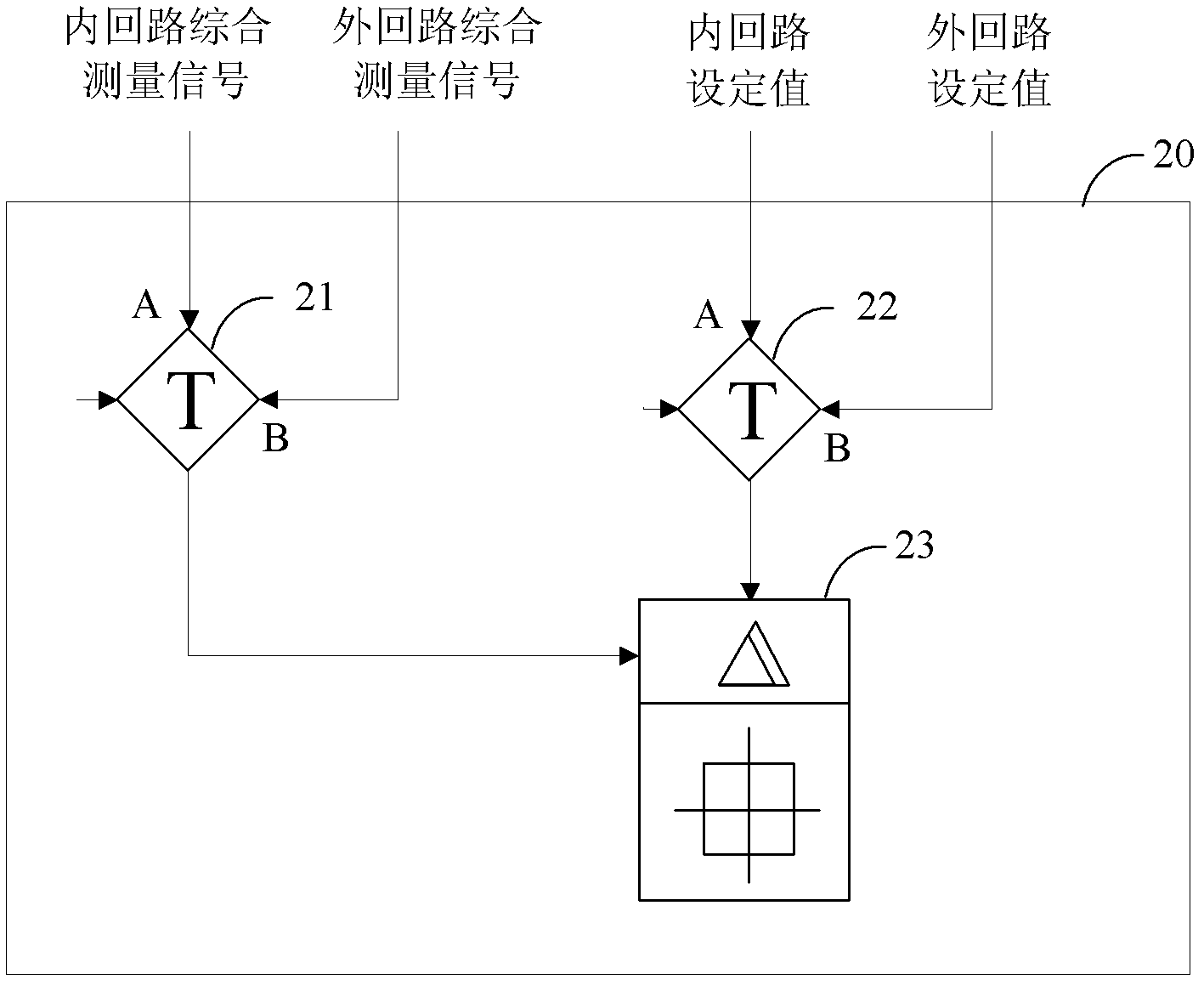
[0014] The cascade gain self-scheduling PID controller includes: a PID gain self-scheduling inner control loop 10, a detection and tuning loop 20 and a PID gain self-scheduling outer control loop 30, and the detection and tuning loop 20 is respectively connected to the PID gain self-scheduling Inner control loop 10 and said PID gain self-scheduling outer control loop 30;
[0015] The PID gain self-scheduling inner control loop 10 includes an inner loop PID gain self-scheduling controller and an inner loop control mode switch 15, and the input end of the inner loop control mode switch 15 is connected to the inner loop PID gain self-scheduling control The output terminal of the device, its control terminal is connected to the output terminal of the detection and setting loop 20;
[0016] The PID gain self-scheduling outer control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More