

Self-adaption strong tracking unscented kalman filter (UKF) positioning filter algorithm based on fuzzy logic
A technology of adaptive algorithm and filtering algorithm, which is applied in satellite radio beacon positioning system, radio wave measurement system, measuring device, etc., can solve the problems of strict prior information requirements, low estimation accuracy, and limited positioning accuracy, etc. To achieve the effect of overcoming model errors, reducing the amount of calculation, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
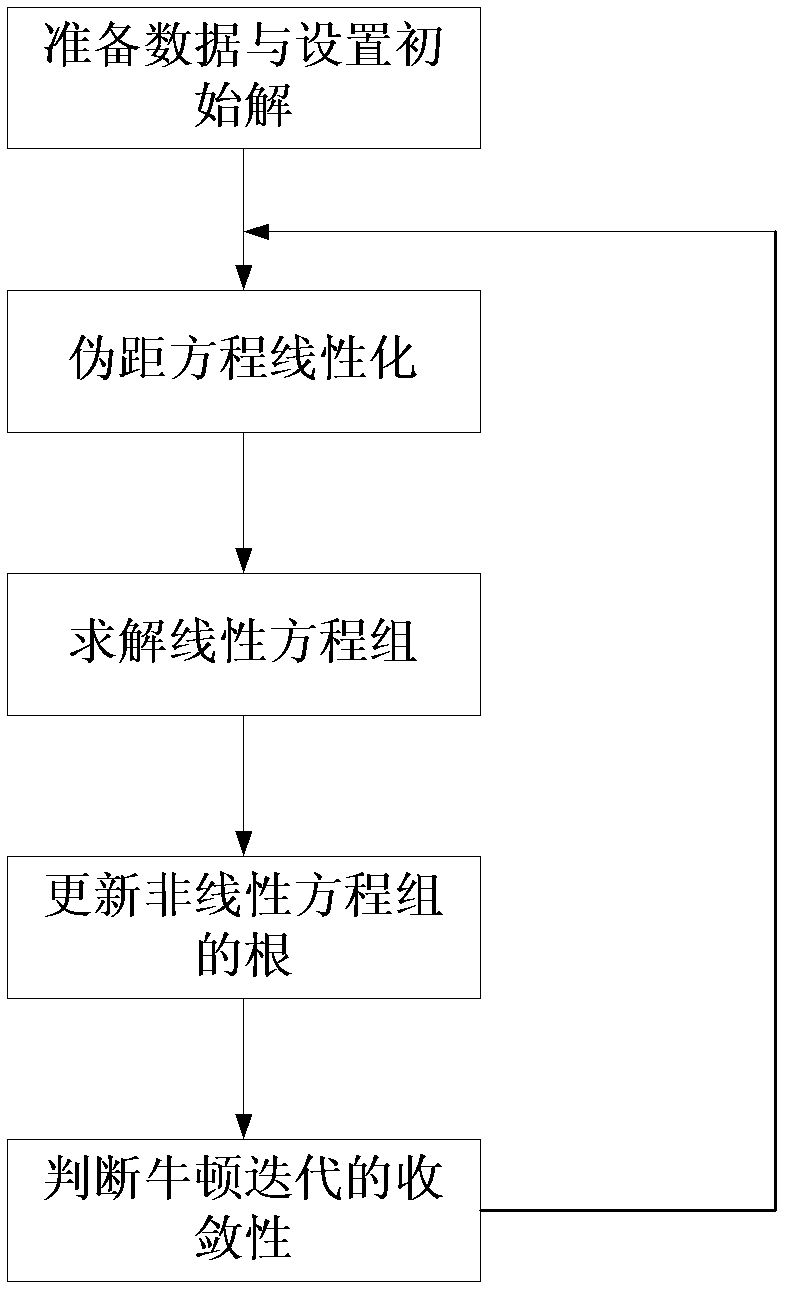
[0048] The data processed in the present invention is the measurement pseudo-range information output by the tracking module of the satellite navigation system, and also includes the position and speed parameters of the satellite at the corresponding tracking time. The positioning of the user receiver is carried out in the earth-centered ground-fixed ECEF coordinate system. Firstly, according to the pseudo-range information obtained by tracking and measuring the satellite signal of the receiver channel, the position parameters and clock difference parameters of the user receiver are calculated. When the channel tr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More