

Wearable and convertible passive and active movement training robot: apparatus and method
A training device and technology for the affected limb, applied in the directions/delivery of computer-aided therapy, muscle training equipment, passive exercise equipment, etc. Frequency, convenient and comfortable use, the effect of shortening the recovery period
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
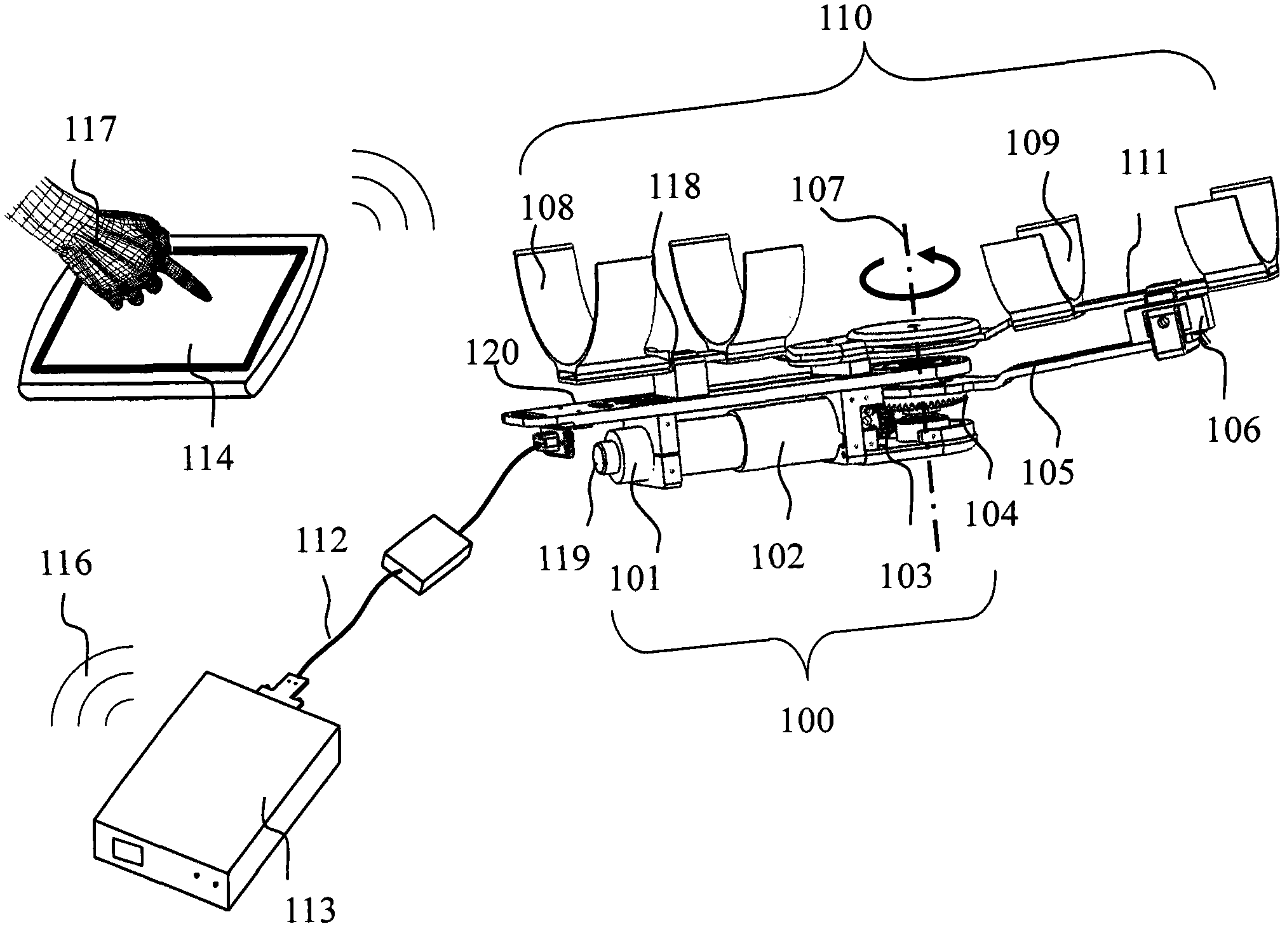
[0044] Fig. 1 shows a training device for an affected limb worn on an elbow joint according to a first embodiment of the present invention.
[0045] The training device for the affected limb comprises: a fixing part, which is used to fix the exercise device for the affected limb; a moving part, which is used for fixing the affected limb, and is rotatably connected to the fixed part through a connecting device; a motor driving part, which Fixed on the fixed part, driven by current, and when the affected limb exerts torque on the moving part, the current changes; transmission device, which connects the motor drive part and the moving part, and when the affected limb exerts torque on the moving part When torque is applied, it can drive the transmission device and the motor drive part to move; and the control part, which is connected to the affected limb training device through a control bus, can control the motor drive part to drive the movement part to rotate through the transmis...
no. 2 example
[0057] Figure 4A limb training device for wearing on an ankle joint according to a second embodiment of the present invention is shown. The structure of this affected limb training device is similar to that of the device in the first embodiment, and the difference is that the anchor 110 (comprising parts 108, 118, 109 and 111) for upper limb forearm and upper arm training is replaced by the ankle joint training anchor 140 (including parts 141, 142, 144 and 145) replaced. In this second embodiment, the fixing portion includes a fixing plate 120 , a first fixing (leg fixing) 142 and a first fixing belt 144 . The moving part includes a fixing plate 105 , a second fixing (foot fixing) 141 and a second fixing belt 145 . The fixing plate 105 is connected with the second fixer 141 as a whole that can push the ankle joint to rotate, and the fixing plate 120 is connected with the first fixer 142 to fix the motor drive part, the transmission device and the leg together. The second f...
no. 3 example
[0063] Figure 6 The vertical limb training device suitable for different joints according to the third embodiment of the present invention is shown. Under different installation conditions, this device can drive different joints (elbow joint flexion and abduction, wrist joint flexion and abduction, palm up / down, ankle dorsiflexion and plantar flexion) for auxiliary force training and resistance training .
[0064] Similar to the above-mentioned first and second embodiments, the standing limb training device of the third embodiment includes a fixed part, a moving part, a motor drive part, a transmission device and a control part. The fixing part includes a fixing base 616, a fixing plate 614 for fixing the motor driving part, and a height adjustment mechanism 606. The height of the fixing plate 614 can be adjusted by the height adjustment mechanism 606 to adapt to different joint heights. The movement part includes a limb fixer 607 and a fixing plate 612, and the limb fixer ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More