

Design method for digital filter of inertial measurement unit (IMU) of mechanically-dithered laser gyroscope
A technology of machine-shaking laser gyro and inertial measurement unit, applied in the field of inertia, can solve the problems of reduced IMU measurement accuracy, large amount of computation, and large difference in output delay of IMU measurement signals.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
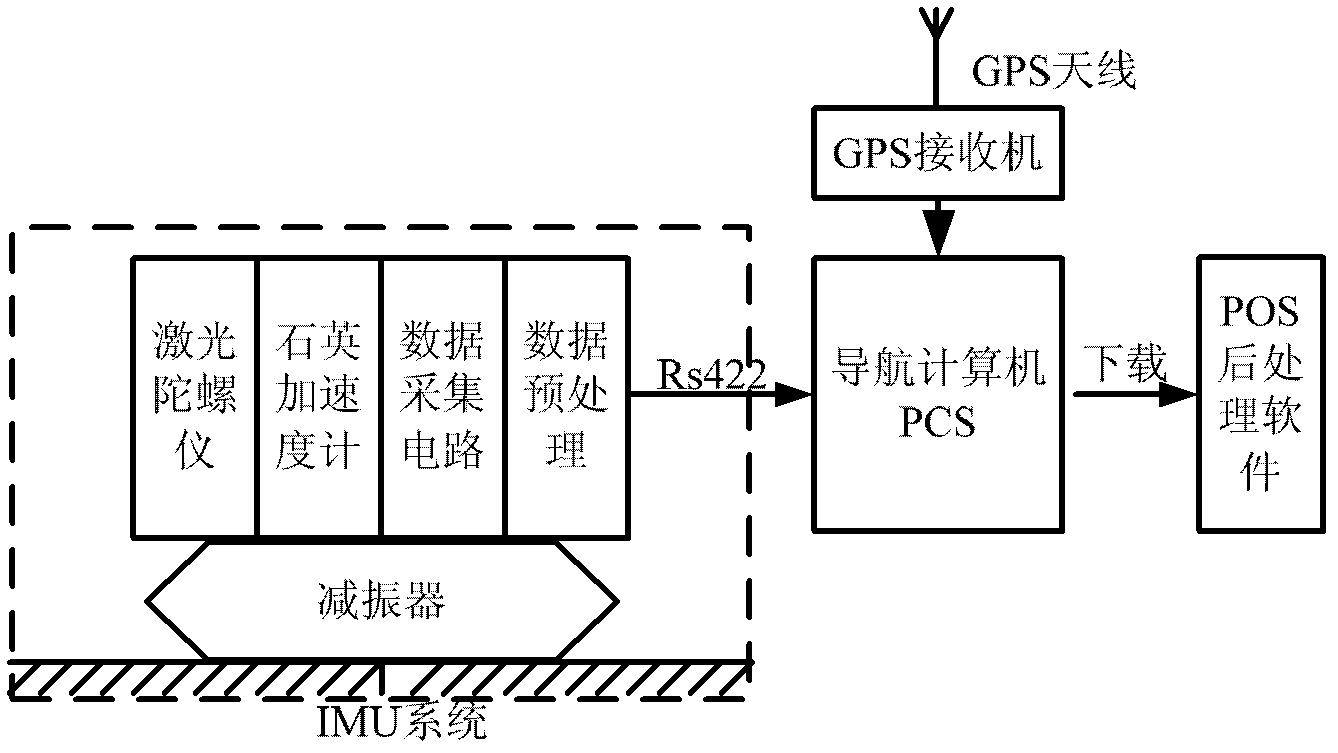
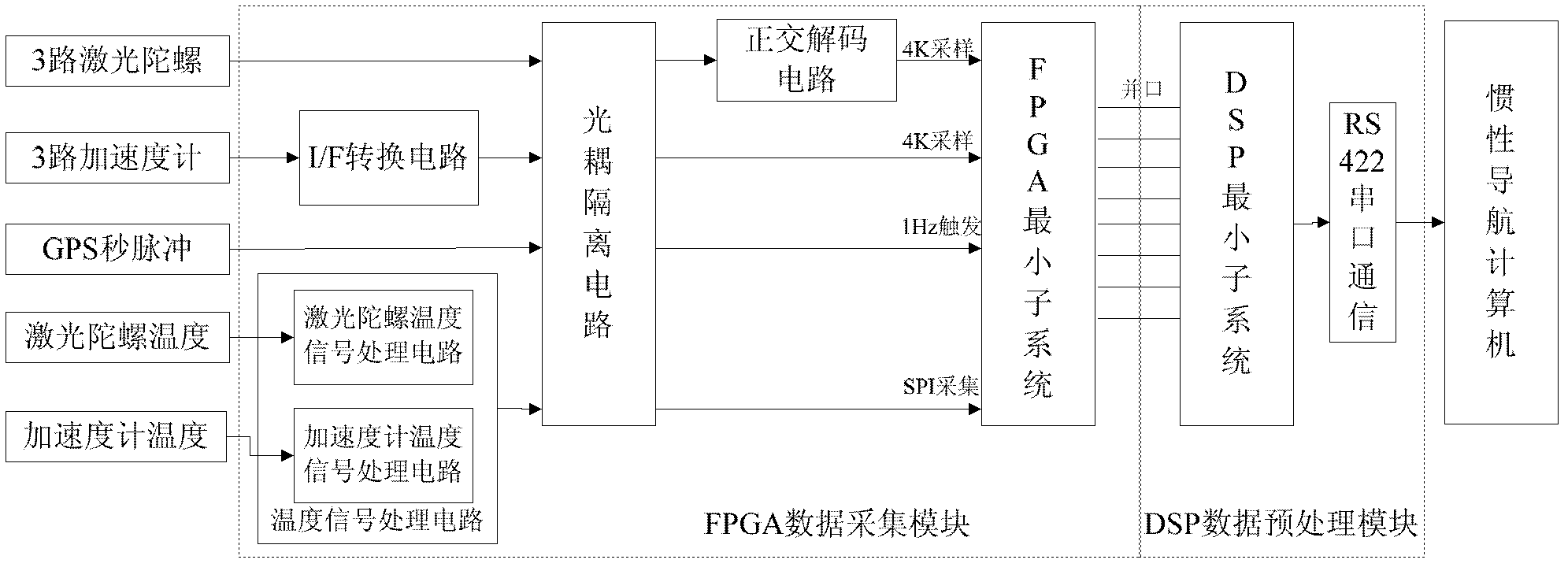
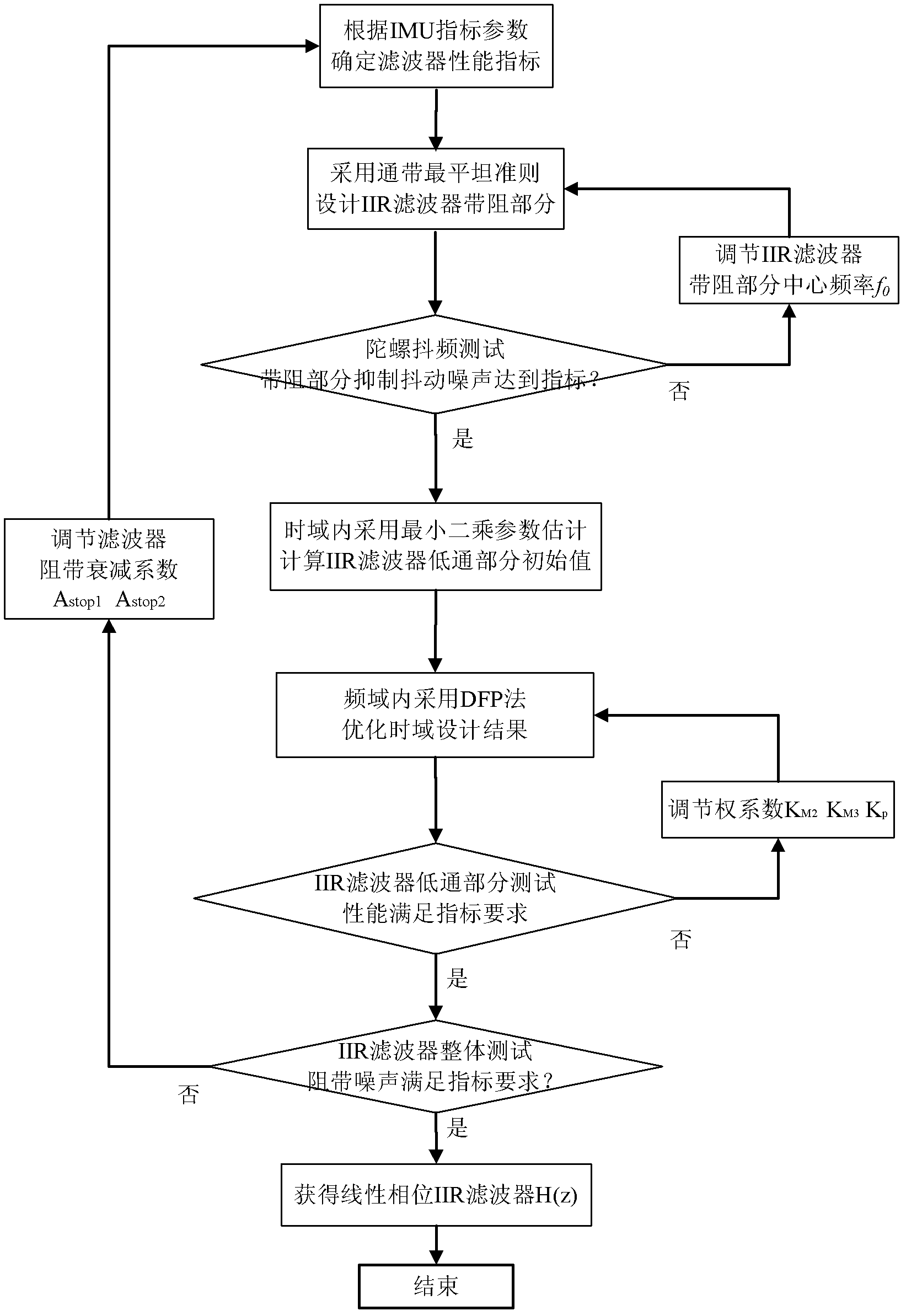
[0020] Such as figure 1 As shown, it is the POS system where the IMU, the object of implementation of the method of the present invention, is located. The IMU includes a laser gyroscope module, a quartz accelerometer module, a data acquisition circuit module and a data processing module. The filter designed by the invention is the main component of the data preprocessing module. Such as figure 2 Shown is the hardware system platform where the filter is located, the signal flow direction is marked in the figure, and the filter program will be in figure 2 Implemented in the smallest subsystem of DSP. Such as image 3 As shown, the specific implementation method is as follows:
[0021] (1) Collect the output signal of the machine-shaking laser gyro at 4KHz, and use the power spectral density analysis method to determine the peak frequency f of the machine-shaking laser gyro jitter noise n and intensity A n And the machine-shaking laser gyro frequency shaking fluctuation r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More