

Six-freedom-degree static-balance parallel motion simulation platform with large bearing surface
A motion simulation and load-bearing surface technology, which is applied in simulators, simulators of space navigation conditions, transportation and packaging, etc., can solve problems such as excessive noise and oil and gas processing, large space occupied by the mechanism, and poor dynamic performance of the system, etc., to achieve improved The effect of bearing capacity and dynamic performance, small space occupied by the mechanism, and easy high-precision servo control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
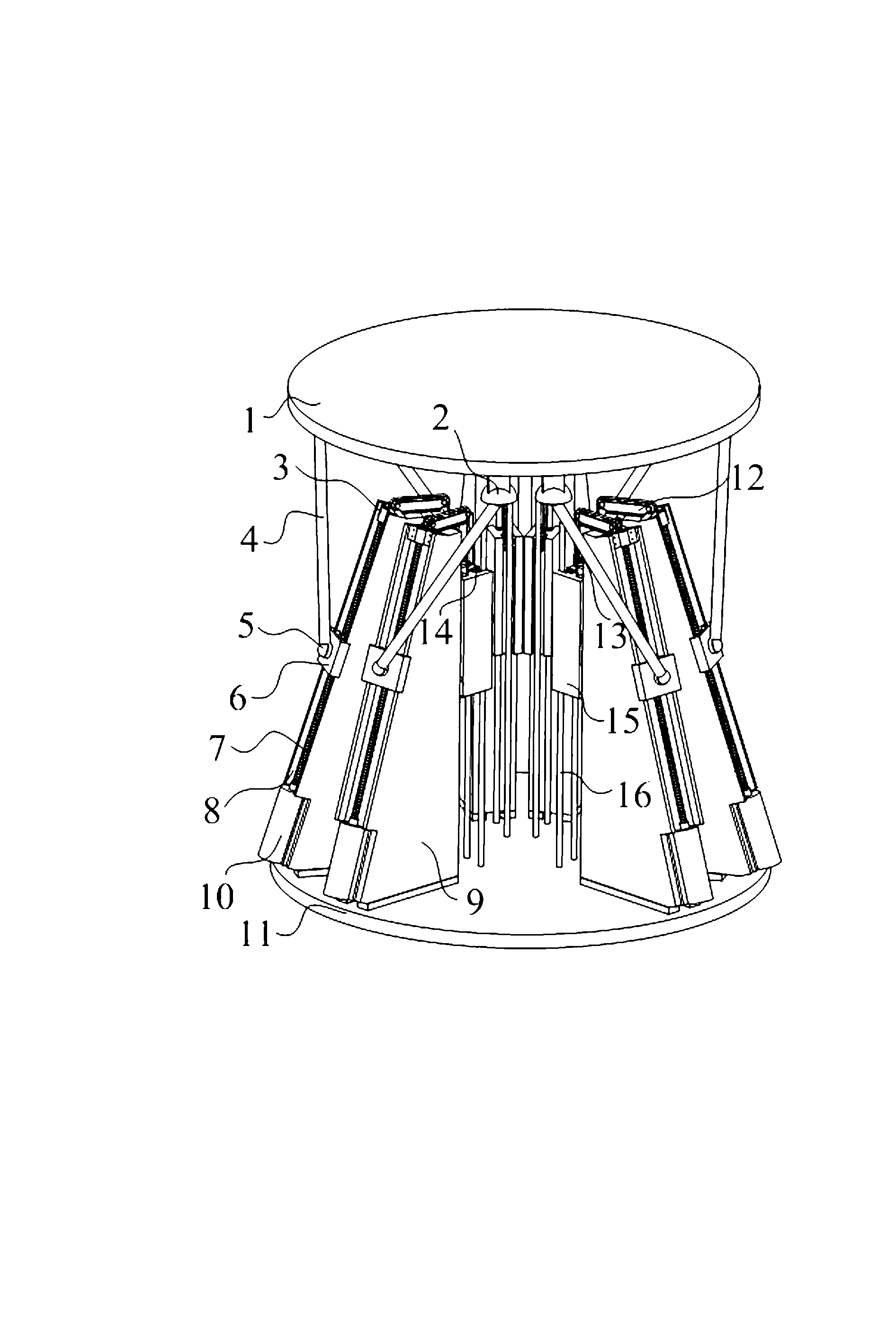
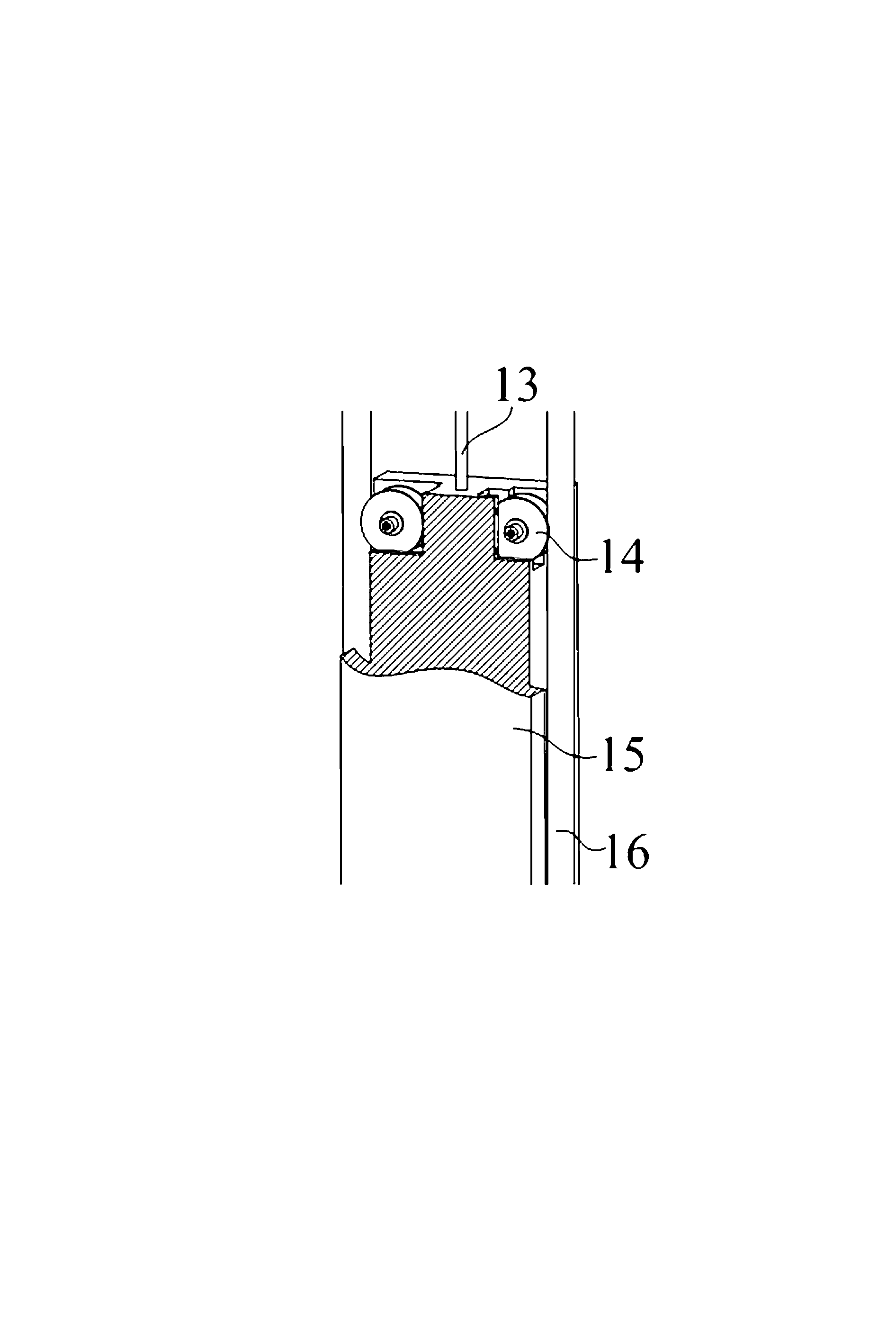
[0017] exist figure 1 In the schematic diagram of the structure of the six-degree-of-freedom large-bearing surface statically balanced parallel motion simulation table shown, six right-angled trapezoidal guide rail seats 9 are evenly fixed on the base 11, the right-angled surface of the guide rail seat is located on the inner side, and the oblique waist surface is located on the On the outside, the angle between the oblique waist surface and the base is 72°, and the center line of the oblique waist surface of each guide rail seat is along the direction of the generatrix of the regular hexagonal platform, and the six center lines intersect at one point. The lower end of above-mentioned guide rail seat outside is all provided with servomotor 10, all is provided with double guide rail 8 on the oblique waist surface of each guide rail seat outside above this servo motor, and the lead screw 7 with screw thread is located in the middle of above-mentioned double guide rail, One end o...
Embodiment 2
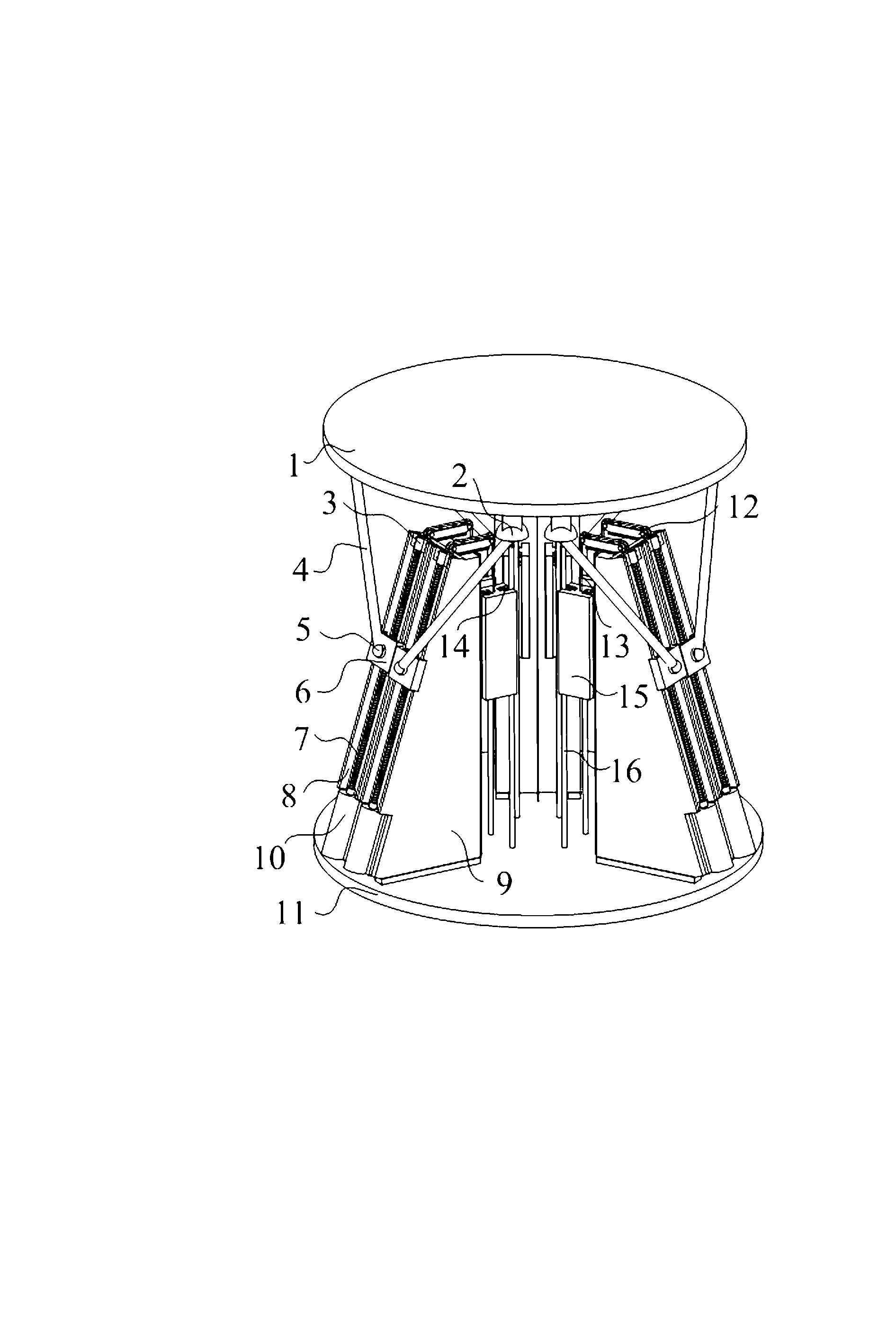
[0020] exist image 3 In the schematic diagram of the structure of the six-degree-of-freedom large bearing surface statically balanced parallel motion simulation table shown, six guide rail seats 9 adjacent to each other form a group, which are evenly fixed on the base 11, and the oblique waist surface of each group of guide rail seats The centerlines are parallel to each other. Other components and connections are the same as in Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More