Modularized biomimetic robotic dolphin push mechanism
A propulsion mechanism and modular technology, applied in the direction of non-rotating propulsion components, etc., can solve the problems that the theory and technology research of the robot dolphin is still in its infancy, and achieve the effect of simple structure and few parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
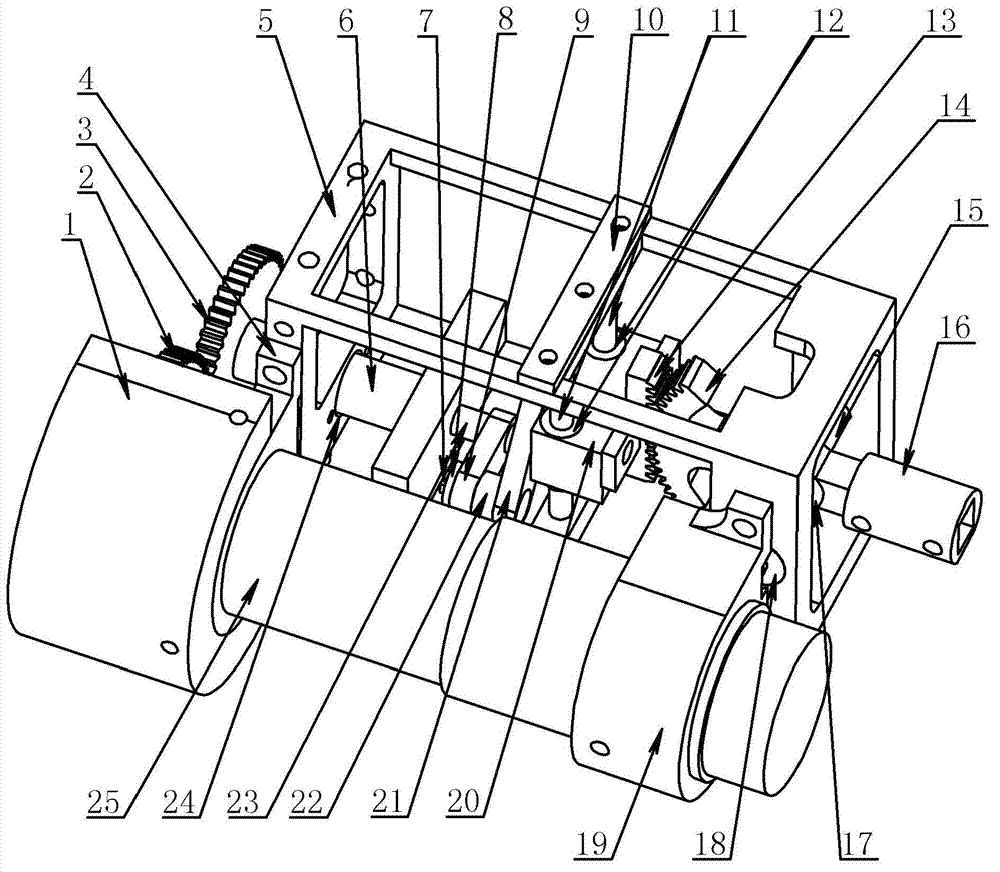
[0012] The present invention proposes a modular bionic robot dolphin propulsion mechanism. The modular propulsion mechanism is connected in series to form the tail of the robot dolphin. The movement of each joint is realized by a DC motor, and the rotational movement of the motor is converted into the movement of the tail. Repeated up and down flapping movement, through the cooperation of multiple joints, forms the dorsal and abdominal undulating movement of the robot dolphin.
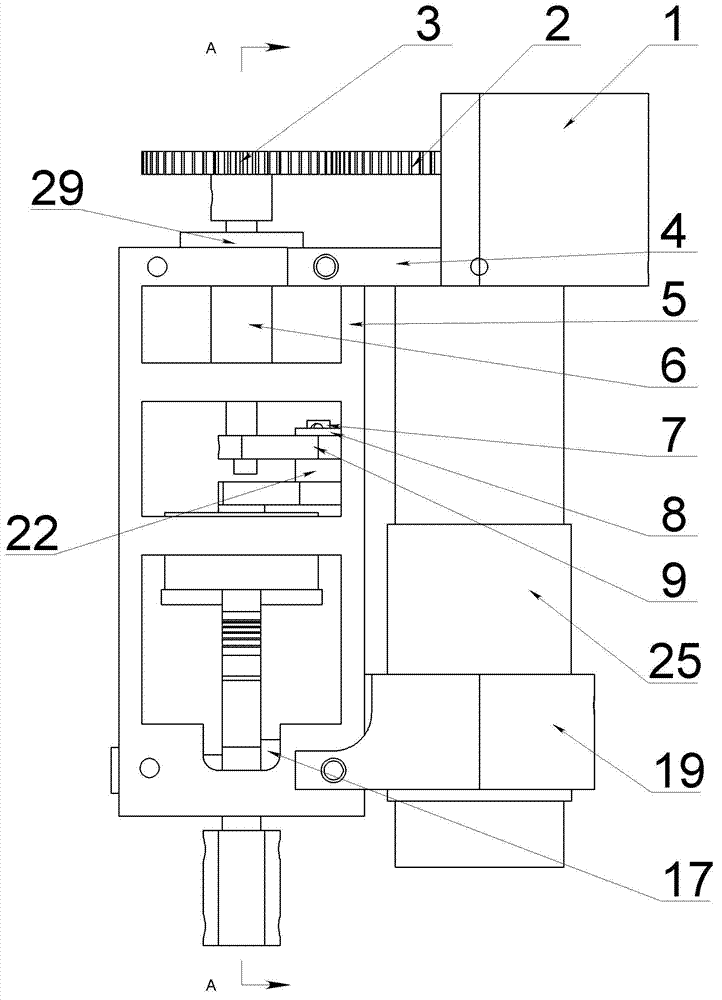
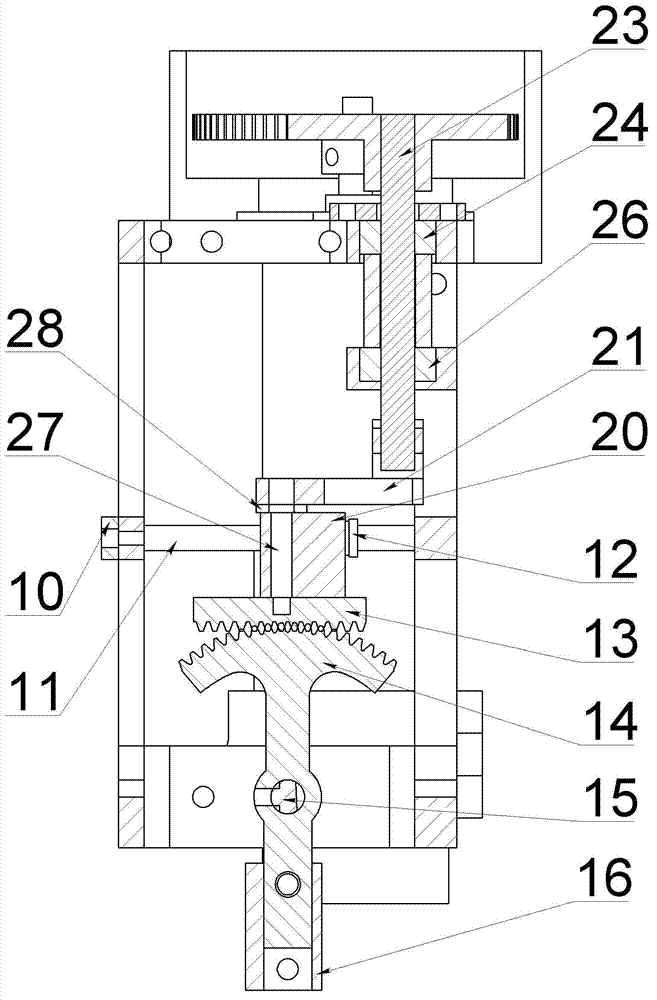
[0013] figure 1 It is an axial view of the modular bionic robot dolphin propulsion mechanism of the present invention. figure 2 It is a top view of the modular bionic robot dolphin propulsion mechanism of the present invention.
[0014] Such as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com