Planar simulation and verification platform for four-degree-of-freedom robot arm control system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to better understand the technical solution of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
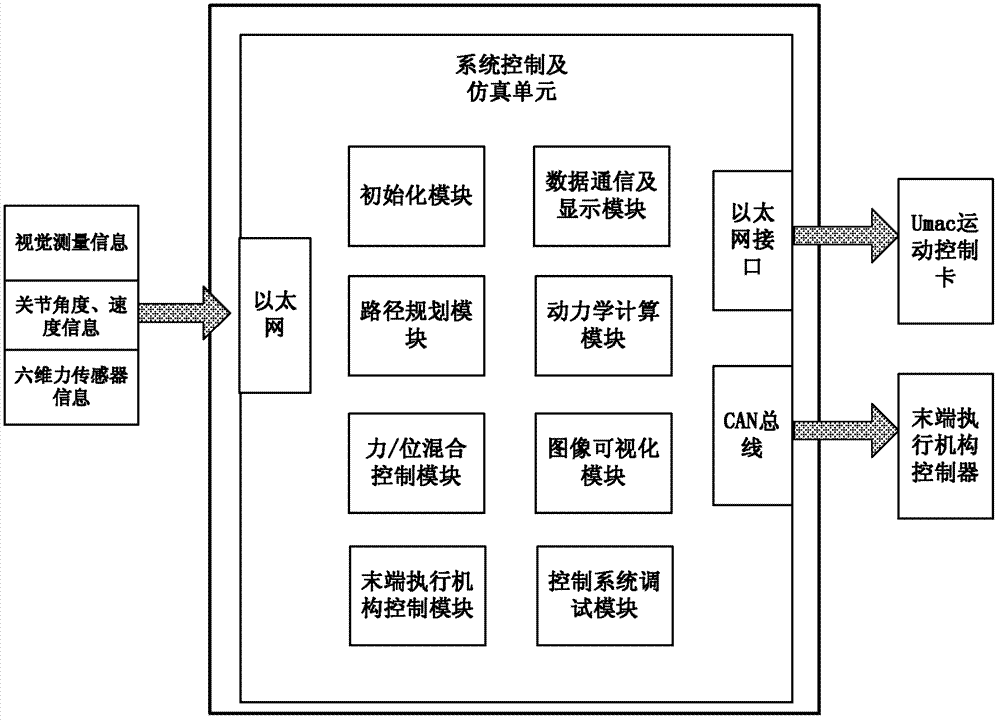
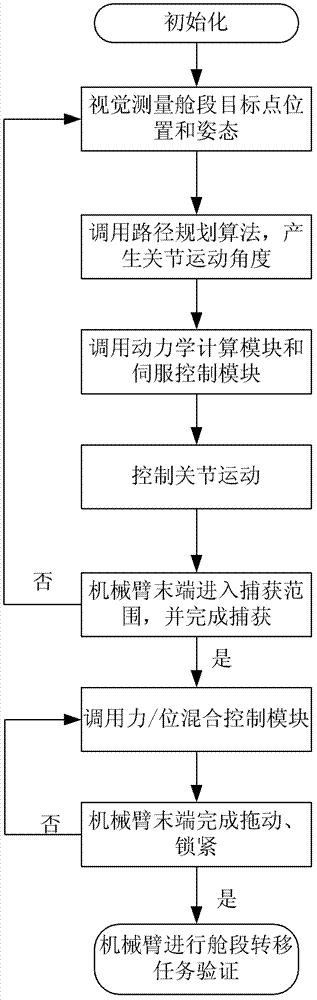
[0030] The invention provides a simulation and verification platform for a planar four-degree-of-freedom manipulator control system. According to the real space manipulator product, the planar motion simulation manipulator with the same dynamic characteristics as the real product is designed and installed on the air-floating platform for verification. Manipulator control strategy, manipulator control system debugging method and end capture and release control method with minimum collision force, study system dynamics / control system characteristics, and achieve the purpose of analysis iteration with simulation model.
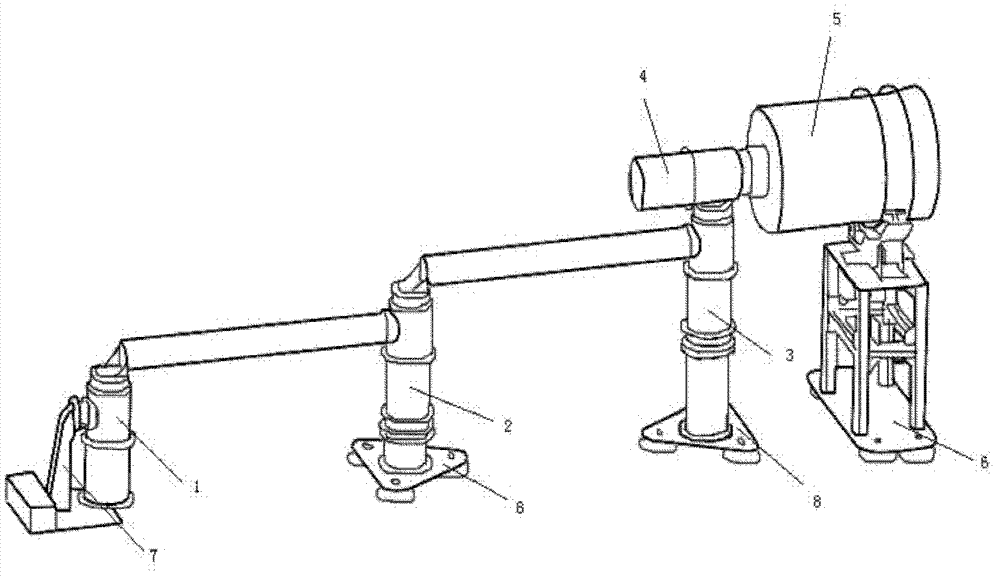
[0031] The platform includes 4 simulated mechanical arm joints, namely the first joint 1, the second joint 2, the third joint 3, and the fourt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More