

B spline track planning method of robot joint space guided by vision
A technology for robot joint and trajectory planning, used in manipulators, program-controlled manipulators, manufacturing tools, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with specific drawings and embodiments.
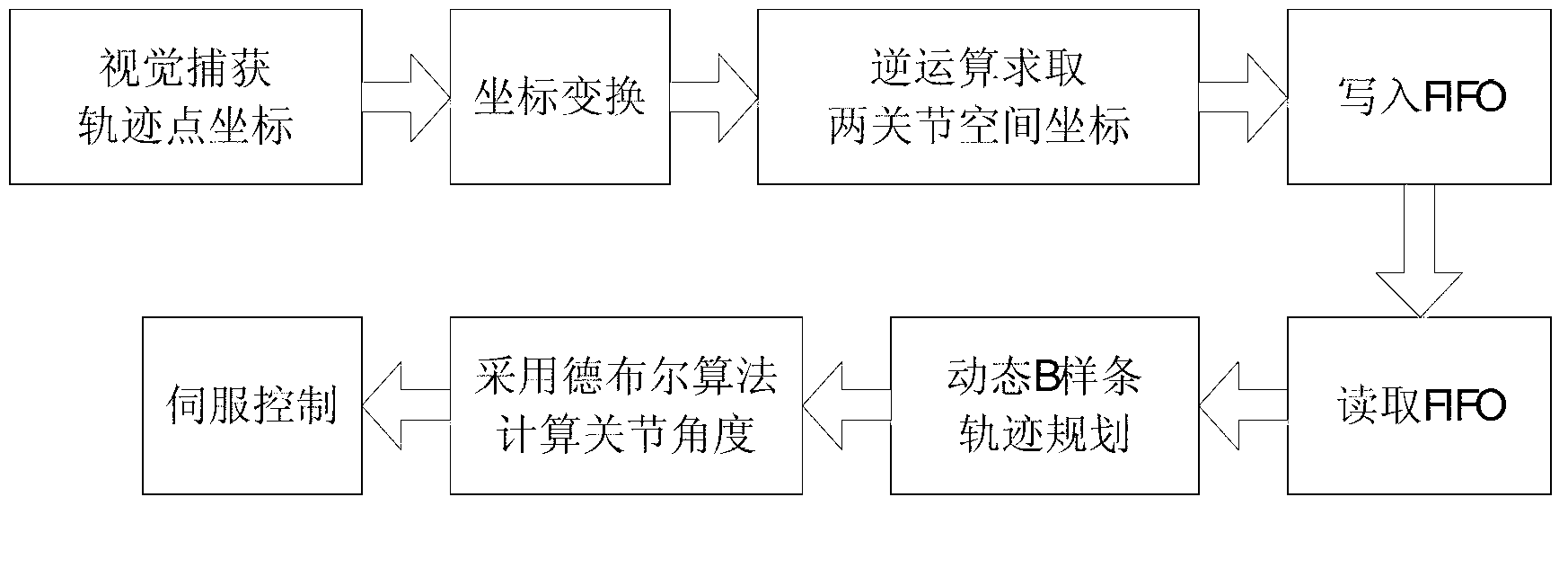
[0028] B-spline trajectory planning is to connect these discrete points into a smooth curve (trajectory) by spline curve method according to the discrete coordinate points in task space or joint space. B-spline trajectory planning in joint space can be interpreted as: firstly use kinematics inverse solution to "convert" the task space path point into joint vector angle value, and then use spline curve method to fit the discrete angle value of each joint into a The smooth curve is the joint space trajectory.
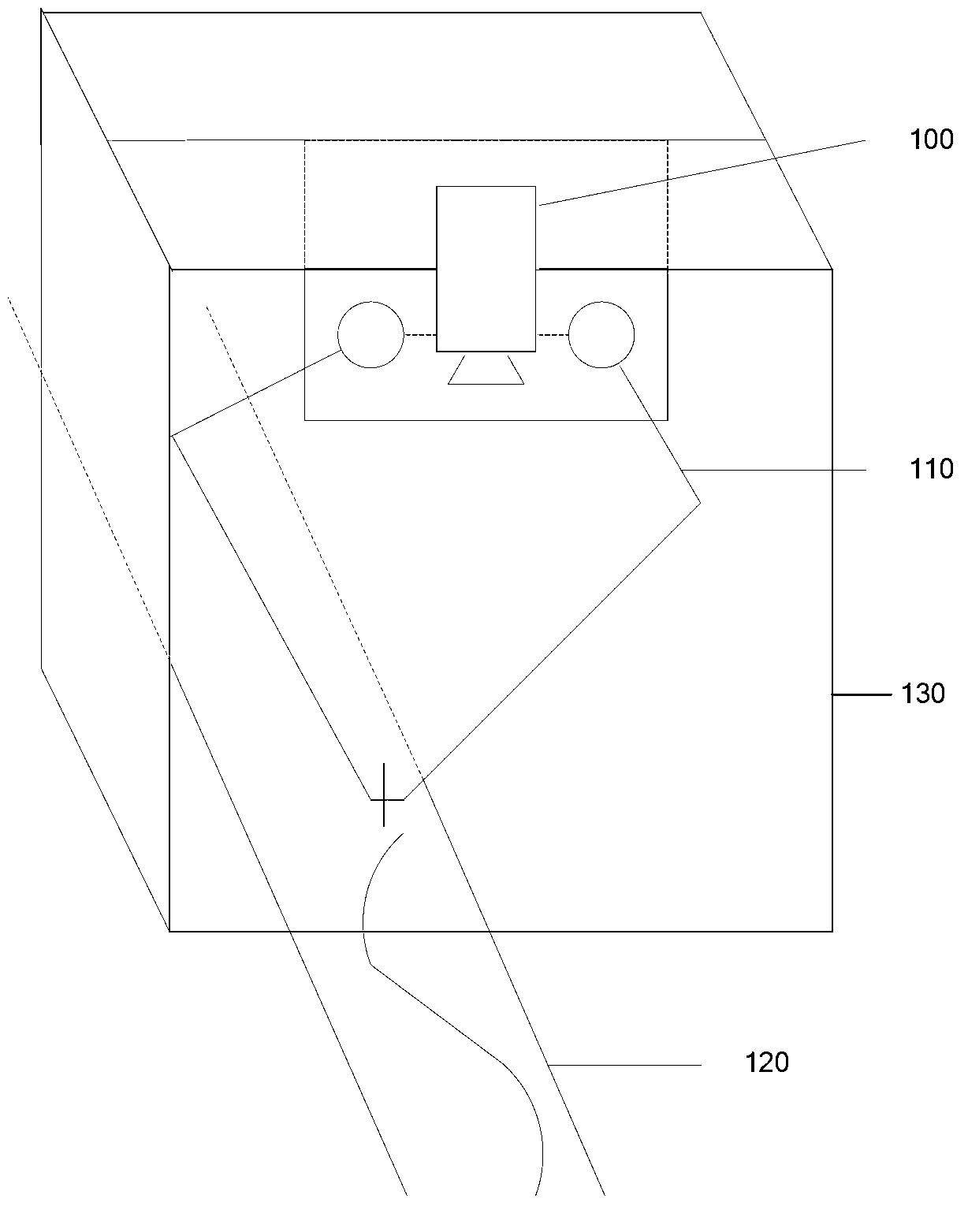
[0029] The invention provides a vision-guided two-degree-of-freedom parallel robot trajectory tracking method for joint space B-spline trajectory planning, which realizes the smooth movement of the robot under the visual guidance and improves the precision of the robot trajectory tracking.
[0030] Such as figure 1 with figure 2 Shown: the robot joint ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More