

Peripherally-actuated auxiliary moment generator for under-actuated system
A technology of under-actuation and auxiliary force, which is applied in the field of scientific research or teaching experimental devices, can solve problems such as high difficulty, limited counter torque, and difficult acceleration tracking, and achieve the effect of no mechanical loss and reduced control difficulty
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
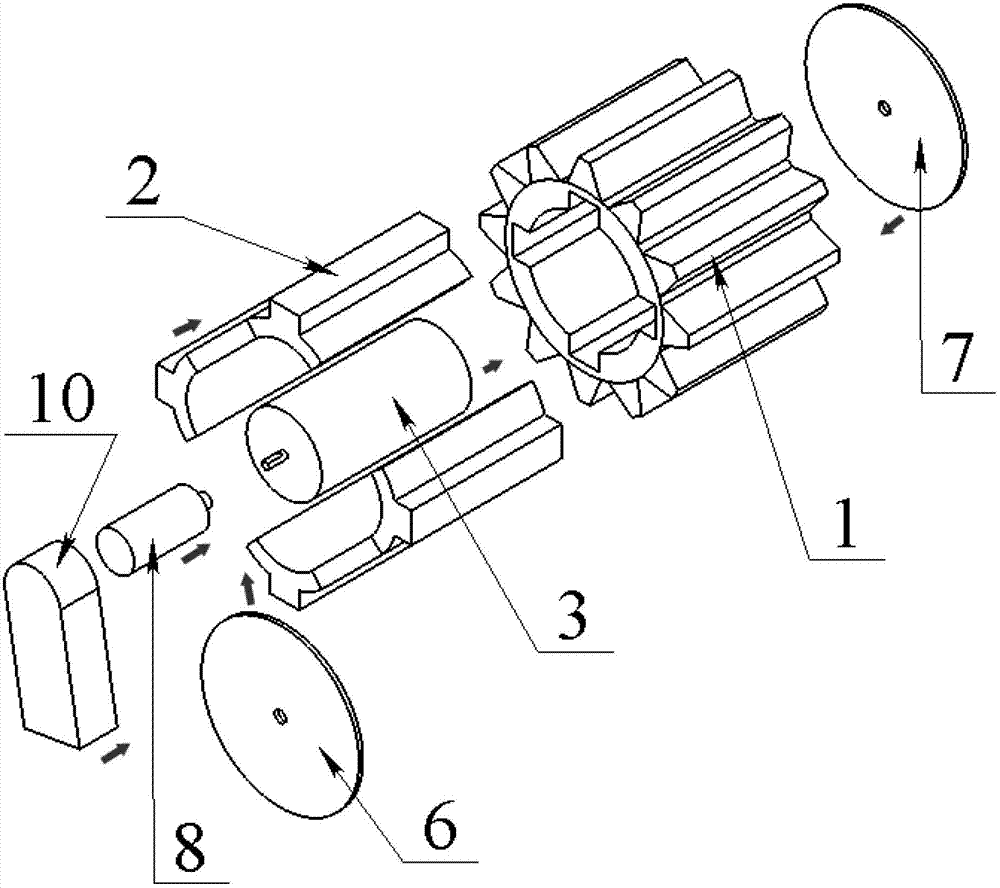
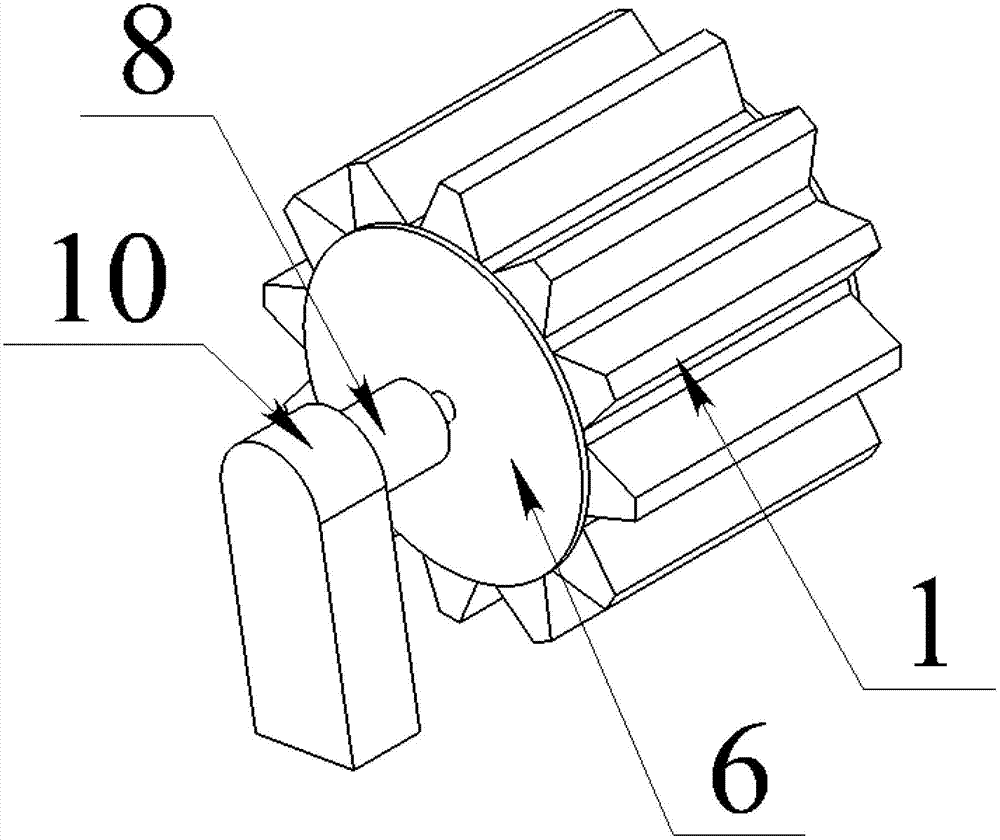
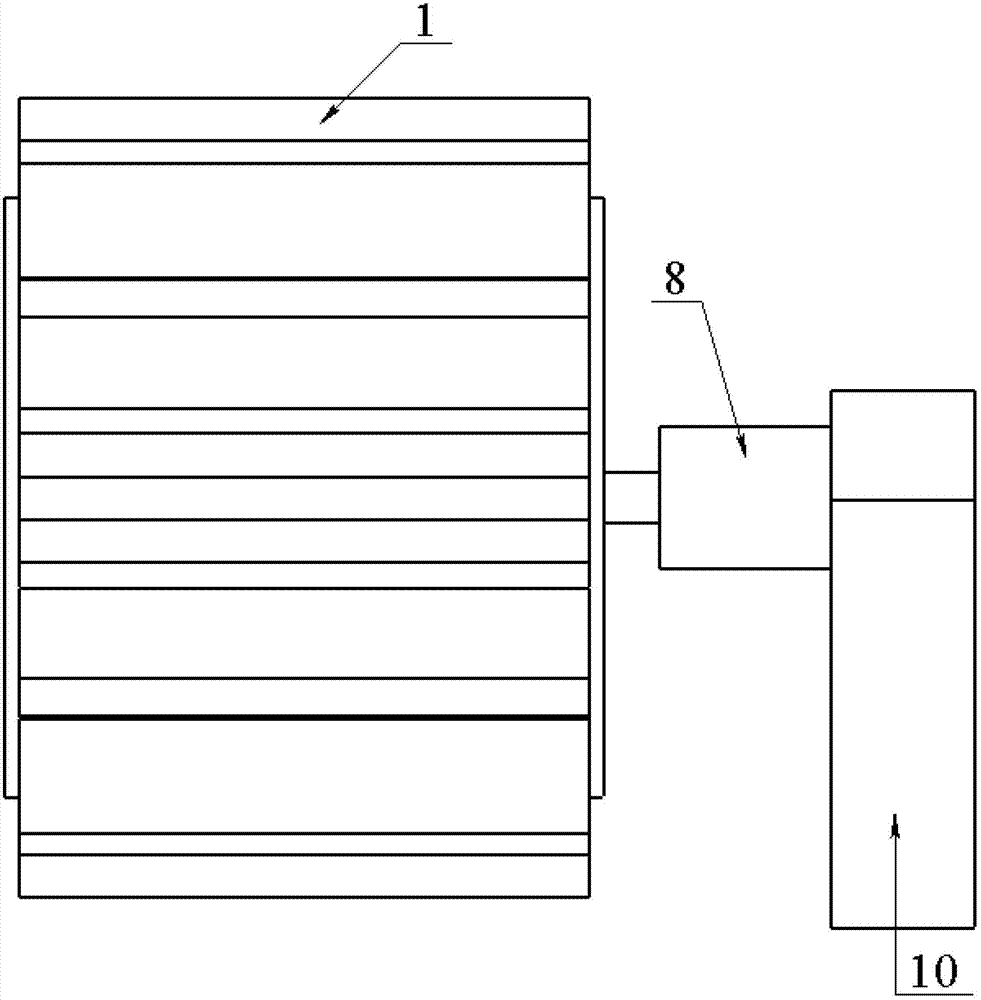
Method used
Image

Examples
Embodiment 1
[0035] Embodiment 1, side balance control of a unicycle robot. Load the device of the present invention onto the body of the unicycle robot, and keep the surface formed by the rotation of the armature winding perpendicular to the forward direction of the uniwheel robot during installation, that is, the axis of the armature winding is parallel to the roll axis roll of the unicycle robot system. The one-wheeled robot should maintain a vertical state as a whole when walking normally, that is, keep the roll angle at zero degrees. If no lateral moment is applied, the one-wheeled robot will fall sideways when it is disturbed by gravity, and it cannot automatically reach a balanced state from an inclined state when it is started. Let the expected roll angle of the one-wheeled robot be Φ E , the real-time roll angle obtained by the one-wheeled robot through the attitude sensor is Φ, and the angles are all positive in the counterclockwise direction, the same below. By calculating Φ ...
Embodiment 2
[0036] Embodiment 2, unicycle robot steering control. Load the device of the present invention onto the body of the unicycle robot, and keep the plane formed by the rotation of the armature winding parallel to the forward direction of the unicycle robot during installation, that is, the axis of the armature winding is parallel to the yaw axis yaw of the unicycle robot system. The control scheme of the yaw moment is similar to the side balance control of the unicycle robot, and will not be repeated here.
Embodiment 3
[0037] Embodiment 3, attitude control of satellites, space shuttles and missiles. Three devices of the present invention are fixedly mounted on satellites, space shuttles or missiles in an orthogonal manner. When it is detected that the above-mentioned objects need to make attitude adjustments, first calculate which axes to rotate around according to the control algorithm, and then drive the directions of the axes in turn. The motor on the upper body rotates to increase the required rotational torque to complete the attitude adjustment. In the case of high control timeliness, when the device configuration is high enough, the torque of the three axes can be provided at the same time, and the attitude adjustment can be completed in one step.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More