Dexterous hand driven by shape memory alloy
A memory alloy and dexterous hand technology, applied in the field of dexterous hands, can solve the problems of limited range of use, heavy and cumbersome tendon transmission mode, etc., and achieve the effect of reduced volume and weight, light weight, simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
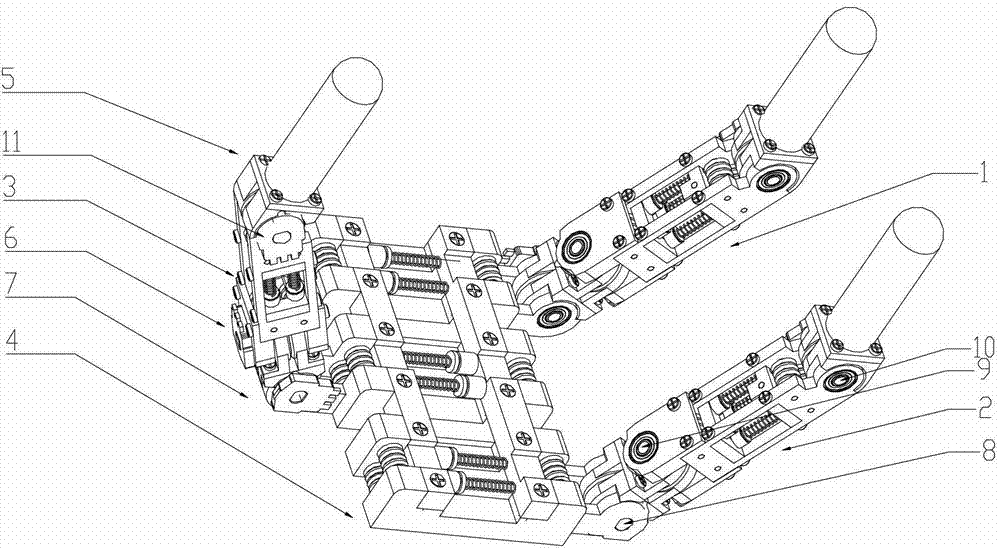
[0022] Such as Figure 1-7 As shown, the dexterous hand driven by shape memory alloy includes the first finger 1, the second finger 2, the third finger 3, the palm 4, the control system, the first finger 1, the second finger 2, the third finger The fingers 3 have the same structure, and the first finger 1, the second finger 2, and the third finger 3 are arranged on the palm 4, and the fingers include the distal phalanx bone 5, the middle phalanx bone 6 and the near finger bone connected in sequence. Joint 7, each finger has 3 degrees of freedom, the distal interphalangeal joint 10 realizes the flexion and extension of the distal phalanx, the proximal interphalangeal joint 9 realizes the lateral swing movement of the finger, and the metacarpophalangeal joint 8 realizes the flexion and extension of the entire finger Movement, the distal phalanx 5 includes fingertip 21, M1.6X4 screw 22, first connector 23, fingertip 21 is connected with the first connector 23 via M1.6X4 screw 22,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More